








8月26日思いがけなく抽選で当たった、2012年NHK大河ドラマ「ふれあいミーティング」に参加してきました。
来年の大河ドラマは「平清盛」で、その撮影が岩手県奥州市の「えさし藤原の郷」で始まり、撮影中の主役「松山ケンイチ」さん、清盛の正妻役の「深田恭子」さん、信西役の「阿部サダヲ」さんが、それぞれの役衣装で出席されました。

NHKの村上由利子アナウンサーの司会でトークショーが行われ、参加者からの質問に答える時間もあり楽しく過ごすことができ、来年1月からの大河ドラマに期待が膨らみます。
終了後「えさし藤原の郷」に入場し、「平清盛」の撮影現場や半分焼け落ちたようなセットを見学してきました。
今回の撮影は第1回から第4回に放送するシーンになるようです。




体中泥を塗ったような扮装の地元のエキストラの方にお話を伺うと、こんなに汚れることは日常生活では無く、扮装をすると別世界に来たような気がすると話していました。


ご苦労様です!!
前回に続きデータロガーのテストです。
キットに付属している「動作確認ボード」を使い、温度データを収集することにします。
「動作確認ボード」には、温度センサーLM35Dと温度設定用の半固定抵抗が「CH1」実装されていております。
データロガーボードの準備
・アナログ入力コネクターに「動作確認ボード」を装着
・ジャンパーCH0をオープンにする
・データロガーボードとPCをシリアル通信ケーブルで接続(USBに接続の場合は変換器を入れる)
・データロガーボードの電源を入れる。
LM35D用半固定抵抗の設定
・LM35Dは測定範囲が0℃~100℃で、0℃=0mv 1℃あたり10mvで変化します。
従って、室温が20度の時は測定値が「200」になるよう半固定抵抗を調整します。
・ボードのロータリーエンコーダーを調整して、LCD1行目に ch1 modeを表示し「on」に設定します
・periodカウンタでログ周期を1秒に設定します・
・測定が開始され1秒ごとにインジケーターが点滅します
・ch1 測定値が表示されるので、半固定抵抗を調整して測定値を室温に合わせます
(例 室温26.2℃→c1=262)
データロガーボードの設定
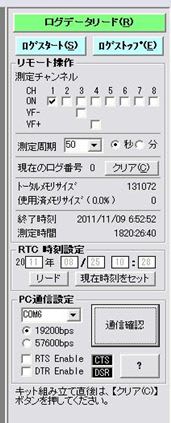
・PCでは、添付ソフトの「AKI PIC Logger」を起動しリモートモードでボードを操作します。
・画面右側の操作部で各種設定を行う

・「ログストップ」、「クリア」ボタンをクリックして初期状態にリセットします
・測定チャンネル1にチェックをいれる。
・測定周期 60秒(任意)
・ログ番号、メモリサイズ、時刻、通信などの確認
・すべてOKであれば「ログスタート」ボタンをクリック
ステータスバーに「ログスタート コマンドを送信しました」と表示されログが開始します
ログの終了
・「ログストップ」ボタンをクリック
この状態でデータは EEPROM に保存されます。
データの読み出し
・「ログデータリード」をクリックするとデータが表示されます

・ファイルメニューの「EEPROMメモリイメージデータを保存」で、バイナリファイルで保存できます
・ファイルメニューの「ログ結果 テキストファイルで保存」で、ウィンドーに表示されている「ログ結果」をテキストデータで保存できます
・ファイルメニューの「ログ結果 テキストファイルで開く」で、「ログ結果」テキストデータを開きます。
このファイルはテキストエディタ、Wordなどで開くことができます
データをExcelに取り込み
・テキストデータは区切り記号に「Tab」を使用しているのでExcelに取り込むことが可能です。 
Excelに取り込んだデータでグラフを作成
秋月電子で販売している、PIC16F877を使用したデータロガーです。
今回は部品実装済みの完成品を購入しました。
この装置は一定間隔でアナログデータを、10ビットのデジタルデータに変換し、ボード上のEEPROMに記録するものです。
記録されたデータは付属のソフトでPCに取り込むことができます。
仕様
・10ビット8チャンネル
・16回のサンプリングを行い平均値をEEPROMに格納
・測定周期 1~255秒または1~255分に設定可能
・RTC実装で正確な時間でログを行うことが可能 大容量コンデンサーによるバックアップ
・通信部 19200/57500BPS、 データ長8ビット、パリティなし、ストップビット1
・動作モード リモートモード PCから制御
スタンドアロンモード LDCの表示を見ながらロータリーエンコーダとMODE/ENTERスイッチで制御

ボードの概要
・アナログ入力コネクタ :アナログ電圧を入力: 測定範囲 0V~4.68V
・ジャンパー: 入力されたアナログ電圧をオペアンプに供給する際、オペアンプの使用形態を変える
・LDC: 16文字2行の液晶ディスプレイ 設定・動作の確認を行う表示器
・大容量コンデンサー: 電源オフの時RTCの時刻データが消えないようにRTCに電源を供給
・インジケータ: ログが行われた時短く点灯
・コントラスト調整ボリューム: LCDモジュールの表示の濃さを調整
・ロータリーエンコーダ: LCDに表示する項目の選定・各種の設定値の変更
・モードスイッチ: 各種の設定項目の変更
・エンタースイッチ: 各種の設定項目の変更
・EEPROM: ログデータを記録する 512kビットタイプで最大4個 1024kビットタイプで最大2個実装可能
1CHの時最大 131,072回のでーたを記録
・動作確認ボード: データロガーの動作確認を行うためのボード
温度センサー(LM35)による 動作確認と半固定ボリュームによりマニュアルで入力電圧を与えることができる
ジャンパーの使い方
ジャンパー0~7とOUT2~3は、付属のショートピンを差すとショート(接続)、抜くとオープン(無接続)になります。
ジャンパーCH0~7
ショートピンを差すとオペアンプのー入力と出力がショートされ、オペアンプは増幅率1倍のバッファーアンプになります。
ジャンパー OUT2~OUT3
A/Dコンバータを外部の基準電圧で動作させる場合にオペアンプをA/Dコンバータから切り離します
入力オペアンプの使い方
測定入力範囲は 0V~4.68Vで、入力電圧の+側を入力コネクタ各入力のAD+に、-側をGNDに接続します。
・オペアンプをバッファーとして使う
入力した電圧がそのまま測定される。ジャンパCHはショート
・オペアンプを非反転増幅器として使う
入力電圧が小さい時、外部に帰還抵抗をつけ、非反転増幅の増幅率を設定します。
ジャンパCHは抜く
増幅率=(RA + RB)÷ RB
増幅率(4倍)=(30kΩ + 10kΩ)÷10kΩ 
・使用しない入力チャンネルのオペアンプ
他の測定チャンネルに影響を与えないように、入力AD+とGNDを外部でショートする
電源
DC7V~9V,電流容量100mAが必要
測定データの収集
動作確認ボードのLM35を使用して温度データのログを作成中です。
ログの内容PCへの取り込み、Excelへの取り込み、グラフの作成については次回掲載します。
2011/8/25 修正
前回に続きステッピングモーターの回転テストです。
今回は、秋月電子で販売されている「PICステッピングモータドライブキット」(¥1,200)を購入し、前回テストしたモータをドライブしてみました。
キットに同梱の説明書 部品一覧




このキットは2相励磁・ユニポーラ駆動でステッピングモータを駆動します。
PICマイコンを使用し、回転に必要なパルスを発生させています。また、タクトスイッチにより正転・逆転・停止をコントロールできます。
モータの回転数は半固定抵抗によりスピード調整ができるようになっています。
組立
背の低い部品から順次基板に取り付け、特に極性のある部品は注意して、極性を間違わないよう取り付けます。
使用方法
電源を入れると励磁電流が流れ、モータは静止トルクが発生し止まったままになります。
静止トルクはかなり強く、手で回すのが困難な状態です。
その時の励磁電流実測値(電源8Vの時 410mA)
左右どちらかのタクトスイッチを押すと回転が始まり離すと止まります。もう一方のタクトスイッチで逆転します。
回転数は可変抵抗で調整できるようになっています。さらに回転数の可変範囲を変更したい場合は、C5の値を変更することで可能です。
C5を大きな値にすると回転が遅くなる。(例 47μ、470μ等)
C5を小さな値にすると回転が速くなる。(例4.7μ、1μ等)
回転数調整によるパルスの変化
回転数が早い場合
回転数を遅くした場合
ステッピングモーターの回転が確認できたので、そのモーターを利用し工作を検討中です。
ステッピングモーターの回転テスト
ジャンク品のステッピングモーターが手に入ったので、使用可否を確かめるべく回転テストを行いました。
ステッピングモーターは、シナノケンシ製の「STH-56D102」1.8DEG/STEP 12V 0.4A と記載されており、ネットでデータシートを探しましたが、よほど古いものとみえ見つけることが出来ませんでした。

やむを得ず導通テストにより固定子コイルの判別を行いました。ステッピングモーターは、一般的に2相励磁・ユニポーラ型が多く、今回の物もリード線が6本出ていますので同種と判断し下記のように判定しました。

回転テスト
ステッピングモーターは、パルスモーターとも呼ばれ、モーターにパルス信号を与えることにより決められた角度(ステップ)で回転します。
そのため、回転制御はもちろん正確に位置決めできることにより、決められた角度を回転する用途に多く用いられます。
今回のモーターは「1.8DEG/STEP」の表示がありますので、ステップは1.8度で1回転(360度)するためには200STEP必要になります。
とりあえず動作確認のため、スイッチによりパルスを1個ずつ加えることにより回転を確認します。

回路は下記の通りで、ブレッドボードに仮配線をしてテストします。スイッチを順番に押すと1.8度ずつ回転すればモーターの動作はOKです。


動作状況
0STEP 4STEP 20STEP
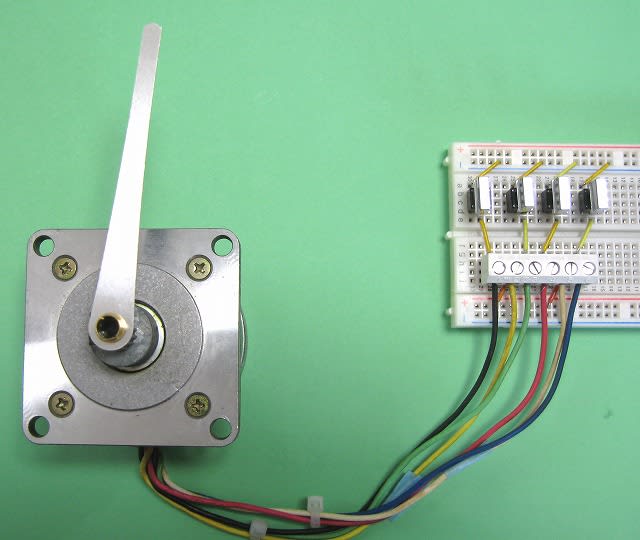
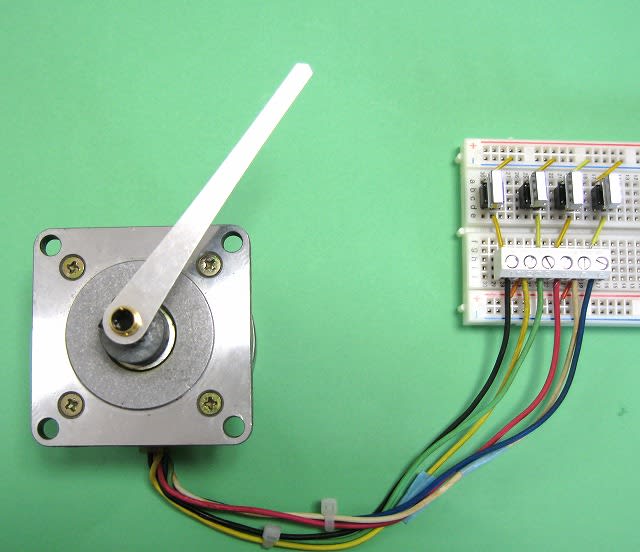
とりあえず回転が確認できました。次回は秋月電子で販売されている「PICステッピングモータドライブキット」を組み立てモータ制御を行ってみたいと思います。
7月の天候について、気象庁報道発表資料が8月1日に発表されました。
それによると、当地盛岡を含む北日本では、上旬に気温が高くなり、また日射時間は太平洋側で多くなっております。
盛岡での日射時間は171.8時間で平年比134%と多く、昨年と比べると39.8時間も多くなております。(昨年132.0時間)
我が家の太陽光発電は発電量337.5kwhで前年比105.9%でした。
昨年より発電量は増えておりますが、日射量の多さに比べると発電量はいまいちで太陽電池の効率低下が影響しているように思われます。
太陽電池の経年変化による発電効率の低下については、現在メーカーに問合せ中で、その間2回設置現場で調査点検を受けております。
既に40日以上経過しておりますので、そろそろ結論がでるものと思っております。









{kind=link}
{kind=link}