








随分前にファクトリーオートメーションということで主としてCP-04産業ロボット組立キットを使って自動搬送システムもどきを制作しておりましたが不完全な所や駆動不備もありましたので今回はすべてを見直して作り変えました。
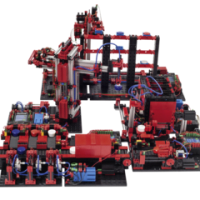
装置全体の写真です。

装置は次のようなロボットおよび搬送装置によって成り立っています。
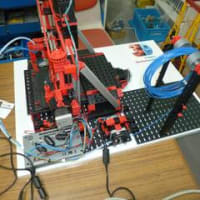
①ワーク吸着搬送ロボット
これはモーターでピストンを動かして空気を抜いてワークを吸着するグリッパーを持った水平移動リフトです。このロボットでは並べた円筒ワークが引き抜かれると自動的に次の円筒ワークが垂直に立つような供給装置を作るのに少し苦労しました。吸着装置は今回発売のRobo TX空気圧ロボットキットで採用されている吸着盤を使用しています。コンベアに到着すると今度はピストンを押し戻して真空状態を解除してワークをコンベアの上に落とします。

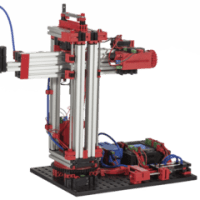
②ワーク供給3Dロボット コンベアに運ばれたワークを感知してワークを溶接スポットへ移送します。産業ロボットのキットをそのまま使っています。

ここまでの動きは ここからご覧いただけます。
③溶接ロボット これも産業ロボットキットにある溶接ロボットです。ワークをフォトトランジスターが感知すれば移動して2か所溶接します。

④ワーク&検査ロボット コンベアにワークが載せられると感知して移送しドリル盤の前で停止した後ドリルした後カラーセンサーでワークを色識別し黄色以外のワークを排除します。黄色のワークは次の工程にいきますがその他の色のワークはサイドに押し出されます。

ここまでの動きは ここからご覧いただけます
⑤反転搬送コンベア これも産業ロボットキットの反転ロボットにコンベアを接続したものです。コンベアの端まで来るとフォトトランジスターが感知するとコンベアは停止します。

⑥水平搬送パレタイザー コンベアにワークが届くと感知して移動しワークをつかんでパレットへ運びます。ワーク2個を並列に並べるとパレット搬送ロボットに信号を送ります。

ここまでの動きは ここからご覧いただけます。
⑦パレット搬送自走ロボット これは自走ロボットですが信号を受けるとライントレースしながらパレットを目的地まで搬送したあと元の位置に戻り次のパレットにワークが積まれるのを待ちます。この自走ロボットは9Vニッカドバッテリーを使用するのですが電圧が8.5V以下に降下するとプログラム通りに動いてくれません。常に電圧をチェックしてから作動させる必要があります。ライントレースには新しい赤外線センサーを使用しています。

自走ロボットの動きは ここからご覧いただけます。
ビデオが長すぎたので4分割しましたので少し見づらくなっています。
ワーク貯蔵所からワークを搬出しコンベアに乗せると3Dロボットで溶接拠点に移送し溶接が完了すれば次の機械加工工程に送られ穴あけ作業の後商品検査をして色識別を行い次にワークを上下反転させて次の工程へ送りパレットに積み込み自走ロボットで所定位置に保管します。
このプロセスは実際の工場の加工工程とは異なりかなりの無駄もありますが製造ラインのシーケンシャルな流れを自動化すればこのようになるのでないかという一つのシミレーションモデルです。

装置全体の写真です。
装置は次のようなロボットおよび搬送装置によって成り立っています。
①ワーク吸着搬送ロボット
これはモーターでピストンを動かして空気を抜いてワークを吸着するグリッパーを持った水平移動リフトです。このロボットでは並べた円筒ワークが引き抜かれると自動的に次の円筒ワークが垂直に立つような供給装置を作るのに少し苦労しました。吸着装置は今回発売のRobo TX空気圧ロボットキットで採用されている吸着盤を使用しています。コンベアに到着すると今度はピストンを押し戻して真空状態を解除してワークをコンベアの上に落とします。
②ワーク供給3Dロボット コンベアに運ばれたワークを感知してワークを溶接スポットへ移送します。産業ロボットのキットをそのまま使っています。
ここまでの動きは ここからご覧いただけます。
③溶接ロボット これも産業ロボットキットにある溶接ロボットです。ワークをフォトトランジスターが感知すれば移動して2か所溶接します。
④ワーク&検査ロボット コンベアにワークが載せられると感知して移送しドリル盤の前で停止した後ドリルした後カラーセンサーでワークを色識別し黄色以外のワークを排除します。黄色のワークは次の工程にいきますがその他の色のワークはサイドに押し出されます。
ここまでの動きは ここからご覧いただけます
⑤反転搬送コンベア これも産業ロボットキットの反転ロボットにコンベアを接続したものです。コンベアの端まで来るとフォトトランジスターが感知するとコンベアは停止します。
⑥水平搬送パレタイザー コンベアにワークが届くと感知して移動しワークをつかんでパレットへ運びます。ワーク2個を並列に並べるとパレット搬送ロボットに信号を送ります。
ここまでの動きは ここからご覧いただけます。
⑦パレット搬送自走ロボット これは自走ロボットですが信号を受けるとライントレースしながらパレットを目的地まで搬送したあと元の位置に戻り次のパレットにワークが積まれるのを待ちます。この自走ロボットは9Vニッカドバッテリーを使用するのですが電圧が8.5V以下に降下するとプログラム通りに動いてくれません。常に電圧をチェックしてから作動させる必要があります。ライントレースには新しい赤外線センサーを使用しています。
自走ロボットの動きは ここからご覧いただけます。
ビデオが長すぎたので4分割しましたので少し見づらくなっています。
ワーク貯蔵所からワークを搬出しコンベアに乗せると3Dロボットで溶接拠点に移送し溶接が完了すれば次の機械加工工程に送られ穴あけ作業の後商品検査をして色識別を行い次にワークを上下反転させて次の工程へ送りパレットに積み込み自走ロボットで所定位置に保管します。
このプロセスは実際の工場の加工工程とは異なりかなりの無駄もありますが製造ラインのシーケンシャルな流れを自動化すればこのようになるのでないかという一つのシミレーションモデルです。






※コメント投稿者のブログIDはブログ作成者のみに通知されます