









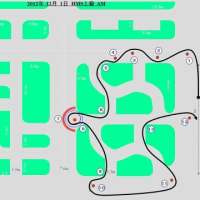
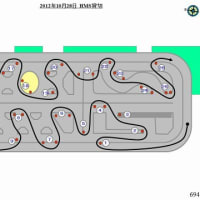
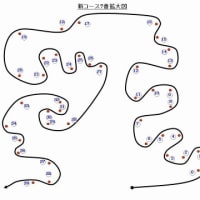
図のような、Uターンを多用したコース設定があったとします。これは仮定のコースレイアウトですが、スタートしてすぐのターンを除いて、八つのUターンがあります。初級から中級にかけての時期に、仮にこのようなコースを走ると、似たようなコーナーの連続ですが、その中でも楽に走れるコーナーとうまく走れないコーナーがあるはずです。
うまく走れないという時には、一つには小さいので曲がりきれないということですが、それ以外にコーナーを曲がり終えるまでに失速してしまい、出口に向かう前にアイドリング回転まで落ちてしまうということがあります。アイドリング回転まで落ちると、それ以上バイクを傾けておくことができなくなり、やむなくバイクを起こして、そのスピードのまま、バイクを立ててハンドルを切って回っていくことになります。
このように回転が落ちてしまったときに、そこからアクセルを開けてスピードを取り戻そうとすると、回転数がうまくコントロールできず、ガクガクしたり、ズンとバイクが前に進んで膨らんでしまったり、あるいは後輪がズリッと滑りだしたりします。
それは小さいほど難しいという単純なものではありません。車両の最小回転半径に近い小さなコーナーは確かに難しいのですが、本当に走れなくてスピードが落ち切ってしまうと、それはそれでアイドリングスピードのまま、どこどこと走れてしまうので、ハンドルを無理やり切って曲がっていくことが出来ます。これは面白くはないですが、自分の曲がれる限界なのですから、それなりに割り切って走るしかないと思えます。
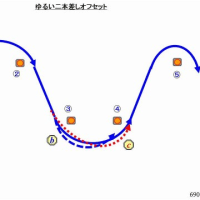
ところがもう少し大きなコーナーで、基本のコーナリングで後ブレーキを引き摺りながら回り込んでいくと、エンジンブレーキと後ブレーキによって徐々にスピードが落ちていくわけです。
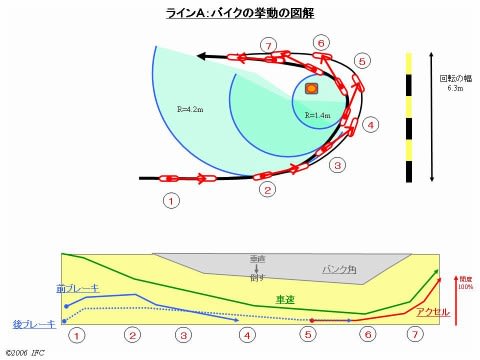
このコーナリングは安定していますが、スピードが落ちきる前に回りきらないといけないわけです。コーナーの回転半径が大きくなればその分進入スピードを上げていくことになります。
一般論として、進入速度は、過小になりやすいものです。高すぎる速度で突っ込めば、旋回円が膨らんで怖い思いをします。そうなると、後ブレーキを使ってスピードを落とし、ラインを内側に修正するわけです。それを避けようとすると、必然的に進入速度は低めになってしまうのです。回転半径が大きく高速で進入するコーナーほど、過小なスピードでアプローチする可能性が高まるでしょう。
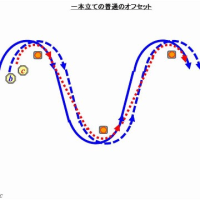
これに対して、Bのコーナリング、つまり寝かせて回るコーナリングが使えるようになると大きい回転半径を回りきれるようになります。こういうコーナリングは公道のコーナリングでは普通に行っているものです。公道のコーナーの回転半径は50Rとか、本当にきついコーナーでも20Rとかです。冒頭の図にあるUターンコーナーは小さいもので3R、大きいものでも7Rというところです。ですから比較にならないのですが、公道のコーナーではブレーキを使って侵入してもその時点でスピードは20kmとか30kmあって、エンジン回転数がありますから、倒し込んでそこから回転を合わせて、パーシャルで回っていくということを自然にやっています。
HMSではこれを小さい回転半径で1速や2速といった反応の強いギアでやるので難しいのですね。

Bのコーナリングは、進入スピードが速ければそんなに難しくはないのですが、もっと小さく回ろうとすると、進入スピードが遅いので、倒し込みを短い時間でスムーズに行う必要があります。また倒しこんだ後に、旋回スピードに合った回転数に合うようにスロットルをちょっと開けてあげるということになります。
で、間の話が長くなりましたが、Bのコーナリングで回れるだけの回転半径があれば、それはそれでスムーズに走れると思います。
従って、冒頭の図のような様々なUターンがあると、1)小さいのでそれなりに回る、2)基本コーナリングで進入速度がぴったり合っている、3)回転半径が大きいのでBのコーナリングで回れる、というところが気持ちよく回れるコーナーになり、それ以外のコーナーは、スピードが気持ち悪く落ちて、だからといってアクセルを開けるとうまくコントロールできずということになってしまうのです。
で、やっと主題になるのですが、コーススラロームを走る上では、自分が「走れるコーナー」と「走らされているコーナー」を早めに見極める。
そして、その気持ちの悪いコーナーを「克服するのか」「回避するのか」を選ぶということです。
「克服する」のなら、頑張って、そういうコーナーで意識してアクセルコントロールに挑戦します。
「回避する」のなら、回転半径を変えるために直線を作ったり奥で小さく回ることでそのコーナーの不具合を回避し、全体をスムーズに走ることを心がけます。
もう少し、長い目で見ると、基本のコーナリングと、寝かせて回るコーナリングの使い分けに熟達していくことを目指すべきだと思います。
うまく走れないという時には、一つには小さいので曲がりきれないということですが、それ以外にコーナーを曲がり終えるまでに失速してしまい、出口に向かう前にアイドリング回転まで落ちてしまうということがあります。アイドリング回転まで落ちると、それ以上バイクを傾けておくことができなくなり、やむなくバイクを起こして、そのスピードのまま、バイクを立ててハンドルを切って回っていくことになります。
このように回転が落ちてしまったときに、そこからアクセルを開けてスピードを取り戻そうとすると、回転数がうまくコントロールできず、ガクガクしたり、ズンとバイクが前に進んで膨らんでしまったり、あるいは後輪がズリッと滑りだしたりします。
それは小さいほど難しいという単純なものではありません。車両の最小回転半径に近い小さなコーナーは確かに難しいのですが、本当に走れなくてスピードが落ち切ってしまうと、それはそれでアイドリングスピードのまま、どこどこと走れてしまうので、ハンドルを無理やり切って曲がっていくことが出来ます。これは面白くはないですが、自分の曲がれる限界なのですから、それなりに割り切って走るしかないと思えます。
ところがもう少し大きなコーナーで、基本のコーナリングで後ブレーキを引き摺りながら回り込んでいくと、エンジンブレーキと後ブレーキによって徐々にスピードが落ちていくわけです。
このコーナリングは安定していますが、スピードが落ちきる前に回りきらないといけないわけです。コーナーの回転半径が大きくなればその分進入スピードを上げていくことになります。
一般論として、進入速度は、過小になりやすいものです。高すぎる速度で突っ込めば、旋回円が膨らんで怖い思いをします。そうなると、後ブレーキを使ってスピードを落とし、ラインを内側に修正するわけです。それを避けようとすると、必然的に進入速度は低めになってしまうのです。回転半径が大きく高速で進入するコーナーほど、過小なスピードでアプローチする可能性が高まるでしょう。
これに対して、Bのコーナリング、つまり寝かせて回るコーナリングが使えるようになると大きい回転半径を回りきれるようになります。こういうコーナリングは公道のコーナリングでは普通に行っているものです。公道のコーナーの回転半径は50Rとか、本当にきついコーナーでも20Rとかです。冒頭の図にあるUターンコーナーは小さいもので3R、大きいものでも7Rというところです。ですから比較にならないのですが、公道のコーナーではブレーキを使って侵入してもその時点でスピードは20kmとか30kmあって、エンジン回転数がありますから、倒し込んでそこから回転を合わせて、パーシャルで回っていくということを自然にやっています。
HMSではこれを小さい回転半径で1速や2速といった反応の強いギアでやるので難しいのですね。
Bのコーナリングは、進入スピードが速ければそんなに難しくはないのですが、もっと小さく回ろうとすると、進入スピードが遅いので、倒し込みを短い時間でスムーズに行う必要があります。また倒しこんだ後に、旋回スピードに合った回転数に合うようにスロットルをちょっと開けてあげるということになります。
で、間の話が長くなりましたが、Bのコーナリングで回れるだけの回転半径があれば、それはそれでスムーズに走れると思います。
従って、冒頭の図のような様々なUターンがあると、1)小さいのでそれなりに回る、2)基本コーナリングで進入速度がぴったり合っている、3)回転半径が大きいのでBのコーナリングで回れる、というところが気持ちよく回れるコーナーになり、それ以外のコーナーは、スピードが気持ち悪く落ちて、だからといってアクセルを開けるとうまくコントロールできずということになってしまうのです。
で、やっと主題になるのですが、コーススラロームを走る上では、自分が「走れるコーナー」と「走らされているコーナー」を早めに見極める。
そして、その気持ちの悪いコーナーを「克服するのか」「回避するのか」を選ぶということです。
「克服する」のなら、頑張って、そういうコーナーで意識してアクセルコントロールに挑戦します。
「回避する」のなら、回転半径を変えるために直線を作ったり奥で小さく回ることでそのコーナーの不具合を回避し、全体をスムーズに走ることを心がけます。
もう少し、長い目で見ると、基本のコーナリングと、寝かせて回るコーナリングの使い分けに熟達していくことを目指すべきだと思います。
※コメント投稿者のブログIDはブログ作成者のみに通知されます