








GPUをGeforceRTX2070に換装しました。
Redshift rendererのベンチマークがQuadroP620だと1時間40分位かかったのにGeforceRTX2070だと12分18秒で完了するとは!スゲー!8倍速です。

まだRedshift rendererの購入はしていませんが(笑)
スペックからするとQuadroP620はもう少し速いと思いましたが、性能を決めるのはcudaの数だけではないのでしょう。
今後も色々なGPUレンダラーについて調べてみたいです。
GPUをGeforceRTX2070に換装しました。
Redshift rendererのベンチマークがQuadroP620だと1時間40分位かかったのにGeforceRTX2070だと12分18秒で完了するとは!スゲー!8倍速です。
まだRedshift rendererの購入はしていませんが(笑)
スペックからするとQuadroP620はもう少し速いと思いましたが、性能を決めるのはcudaの数だけではないのでしょう。
今後も色々なGPUレンダラーについて調べてみたいです。
これまでは15年以上前に職場でもらった100Mbps/10Mbpsのスイッチングハブを使っていました。おかげでTeamRenderはその性能を全く発揮できていませんでした。おまけにノートのマックはクソ遅い無線LAN(54Mbps)を経由してたのでレンダリングのためのデータを転送している間に他のPCががんばってレンダリングが終わってしまうと言う始末。
今回、思いつきで近くのNojimaでELECOMの1000Mbpsのハブと速そうなケーブルを買いました。ようやく本来の性能を発揮してる感じです。

3台で約2倍に高速化出来る感じです。
メインのPCが1フレーム1分でレンダリングすると、他の2台は1フレーム2~2分半でレンダリングしているので、ほぼCinebenchの結果に沿ってるなって感じです。
Cinema4Dのチュートリアル動画を作ろうとしてます。そのテスト
↓コーデックはH.264、10分くらい
↓コーデックはH.265、1分程度
鼻声を何とかしたいdeath
結構言い間違えがありますね・・・(泣)
CineManってよく知らんけど(RenderMan®レンダラ –とその互換レンダラーパワフルで柔軟性のある接続性を提供します。とかR19のヘルプに書いてあります)R20で廃止になったらしく、R19以前で作ったファイルをR20で開くと以下の警告が表示されます(僕だけですか?)。警告が表示されるファイルとされないファイルが有って、ようわからん・・・R20で保存し直しても、再度開くとしつこく表示されるので困っていたのですが・・・

レンダリング設定に残っている「CineMan」の項目名をクリックして選択して、Deleteキー押して削除したら、次に開いた時には警告が出なくなりました。

めでたしめでたし
ちなみ9月にR17からR20にバージョンアップしました。
性能的にはCinebenchR15のOpenGLテストが59.6fpsから113.25fpsになりました。
大したものを作っていないので、今までも特に不満はなかったんだけど。
R19のProRenderも一応動きました。遅いけど(笑)
CUDAコアが384から512基に増えて、メモリがDDR3からGDDR5になってクロックも上がってビューの表示はヌルヌルと動く感じになりました。
もしかしたらOculusRift DK2も少しは快適になるんでしょうか
今まで使ってたAMD FX-8350はCinebnchR15のCPUテストで650cbくらいだったんだけど、この度新型が出て安くなったRyzen7 1700を購入し、さっそくCinebenchR15でテスト!結果は1390cbでした。その後チップセットのドライバを入れてないことを思い出し、インストールしてやり直すと1413cbにアップ!スゲー!凄すぎる!2倍以上だよ

そういうわけで、R19のLODがどんなもんなんだと触ってみたところ、僕が2年前に思いつきで作ったLODとカメラに映らない物を非表示にするXPressoと非常によく似ていることが分かりました。
まぁ、本家のプロが作ったものなので、100倍位高機能だけどね・・・ LODのレベルは何種類も作れるし、クローナーを編集可能にしなくても動作するし、
サンプルファイルは↓
試すにはクローナーを「編集可能」にする必要があります(忘れてて、正しく動作しなくて焦りました)。

↓がR19のLOD
距離が離れると、非表示に出来て更に高機能

ユーザデータのインターフェイスに「2Dベクトル」というのがあります。使い方を調べたときのサンプルファイルをアップします。1つのコントローラーで2方向を一度に操作できるので、例えば眼球をの縦横の回転を一度にコントロールとかできますね。

サンプルファイル↓
直列6気筒エンジンの燃焼工程の順番は多くの場合1→5→3→6→2→4だそうで、コピペした各気筒の部品グループを順番に60°ずつずらしてPSRコンストレイントで連動させました。面白いですね。

そういうわけで、毎年帰省時にペットの亀と金魚の餌やりが大問題になるのですが、と言うか、4日位食べなくても平気じゃろって事で、今までは済ませてきたのです。帰宅して再開したときのあの亀さんの恨めしそうな顔が忘れられない。やっぱり可愛そうなので、Cinema4Dと3DプリンターとArduinoで自動的に餌を与えるマシーンを作ってみました。
ペットコーナーやAmazonなんかでタイマー付きの自動給餌器というのを探したのですが、いい感じなのがない。餌の量を正確にコントロールできるの?って感じでしかも結構なお値段。そこで下のような仕組みを妄想してみました。。
ベルトコンベアの上に箱が乗ってて、それが12時間とか24時間間隔で指定した角度だけ動けば、バケットの中の餌が水槽に落ちるじゃろ!餌の量もメニューも自由に決められるね!
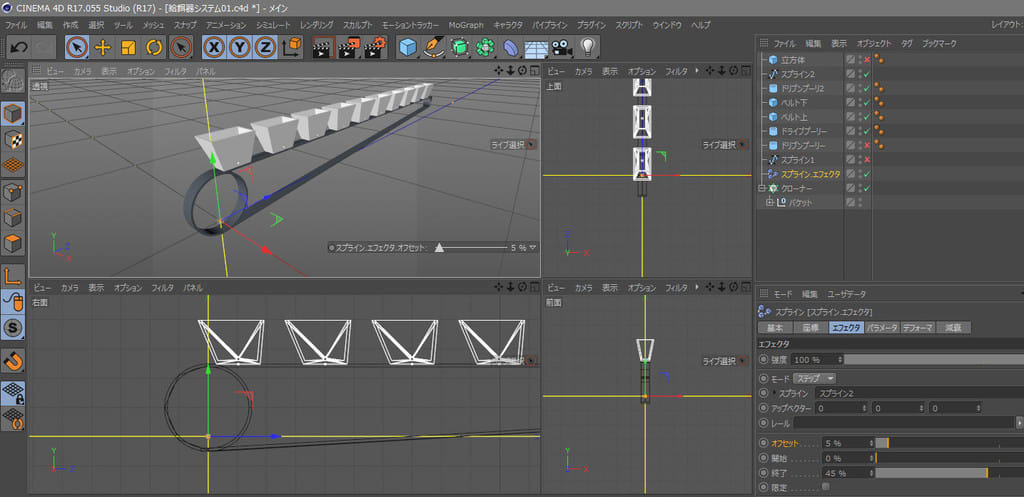
タイマーで指定された時間が来たら、モーターが回転してベルトの上に固定されてるバケットがプーリーの周りを回って下向きになって・・・
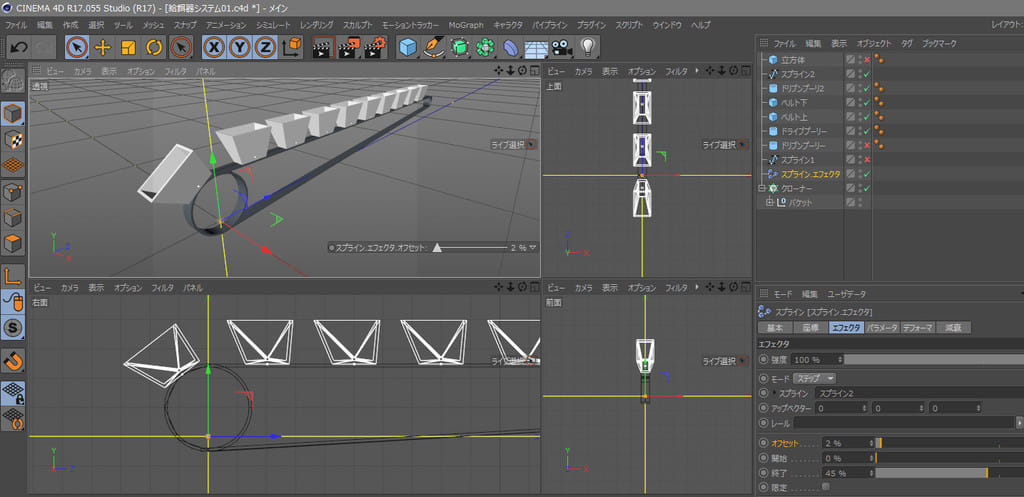
ドサドサー!

MoGraphを使用したシミュレーションではなんとかなりそうだと言う感触を得ることが出来たので、早速、バケット以外のパーツもモデリングします。
モーターマウントは、ステッピングモーターの形状に合わせて作成。ステッピングモーターは↓を購入
https://strawberry-linux.com/catalog/items?code=12026
ついでにステッピングコントローラーの制御基盤は↓を購入
https://strawberry-linux.com/catalog/items?code=12023
ちなみにはんだ付けが甘かったのか、結線のミスだったのか、不良品だったのか分かりませんが発熱が酷くて制御基盤をであるところのL6470を一つ壊しました。
モーターマウント

プーリー(大)
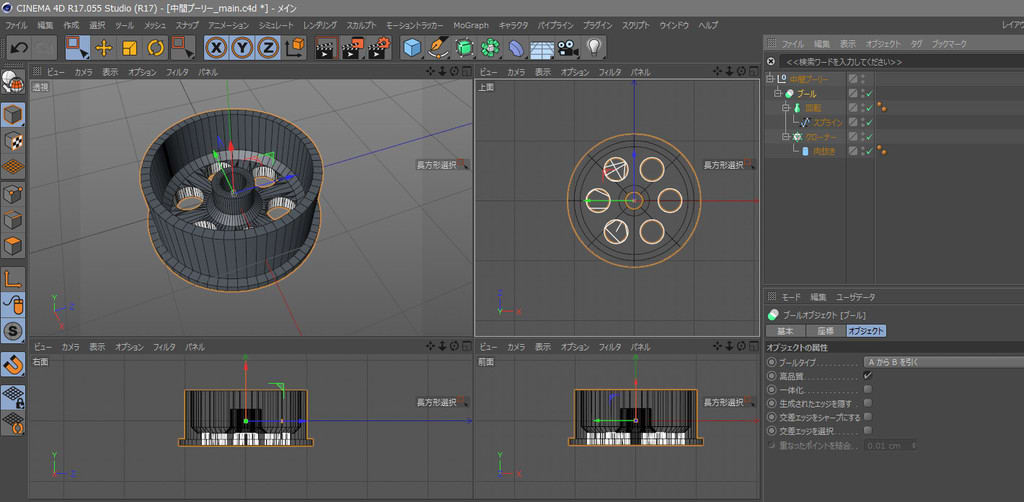
プーリーの反対側の蓋?一体成型で作るとベルトの取り付けが大変だったり、オーバーハングになってうまくプリントできないかなと思って分けました。

プーリーのマウント

出力はMatterControlを使用。久しぶりだったけど、なんとかなりました。

完成した自動給餌器(笑) 中間のプーリーはサイズが小さいのです。

動作する様子↓