








そういうわけで、googleで「unity mecanim」で検索すると、いろいろ教えてくれるページが表示されるので、ちょっとやってみました。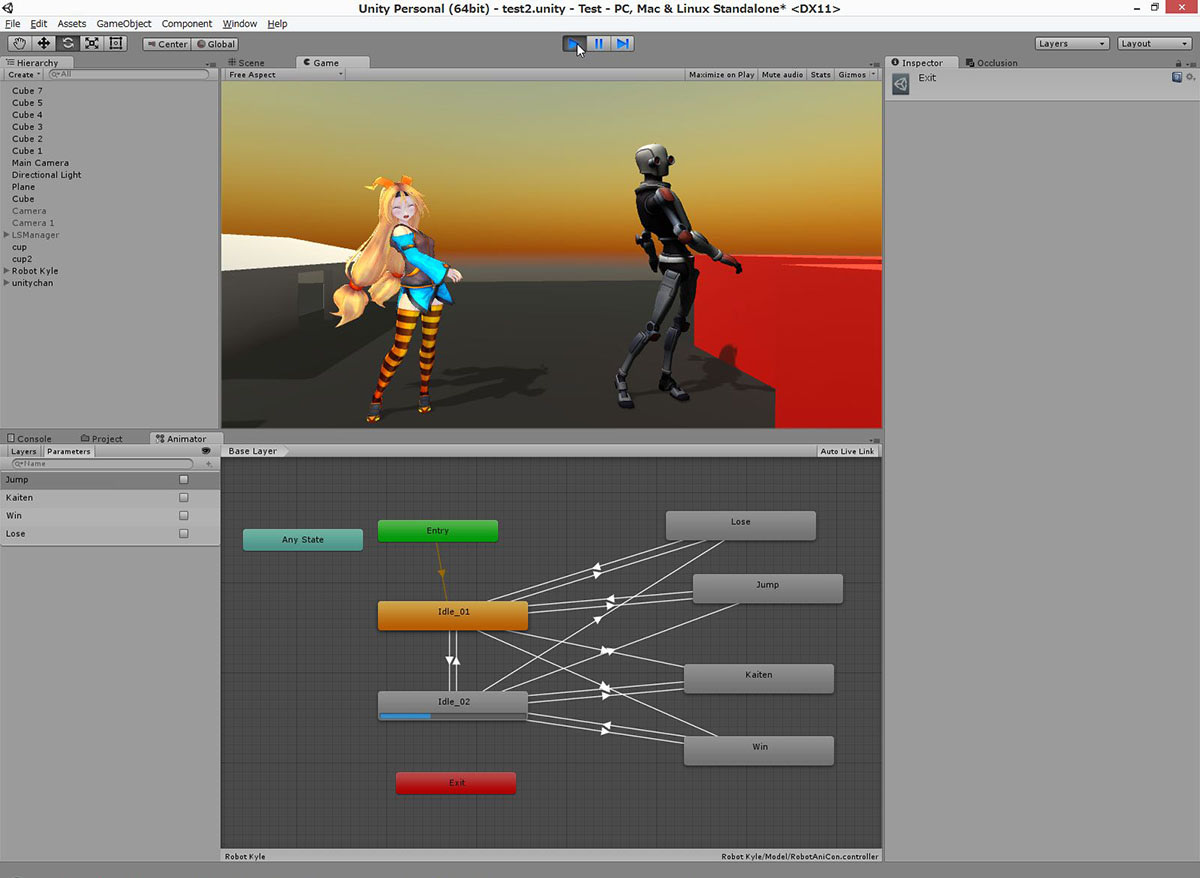
まぁ、とっても可愛らしいこと。
右側のロボにも全く同じモーションを割り当ててます。
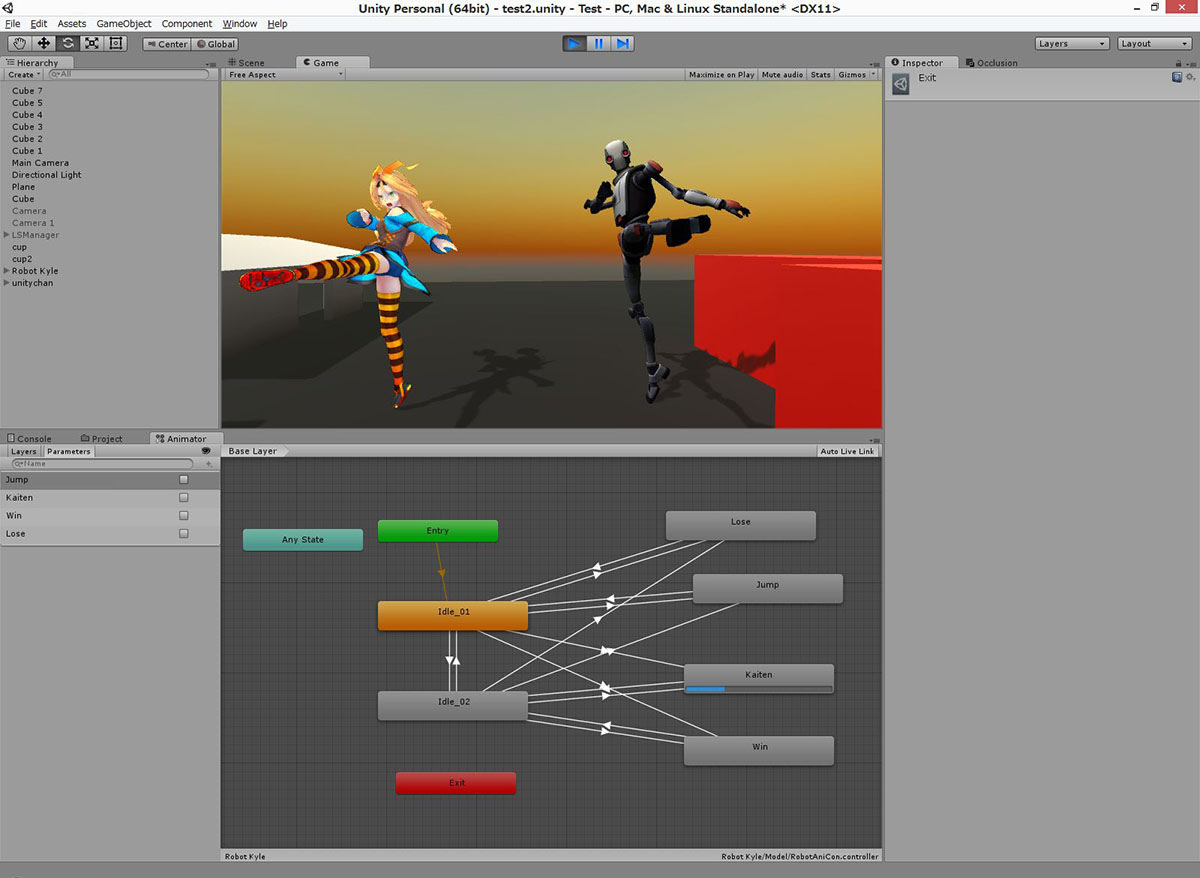
待機状態のステート(Stateって「状態」って理解すればいいんかな)(ここではIdle_01とかIdle_02)からJumpなどのキーボードのキーを割り当てたステートに行く方の線を選択して青くなってる状態で、インスペクタの「Has Exit Time」のチェックを外す必要がありました。Idleのステートに戻る方の線は「Has Exit Time」はチェックされたまま(デフォルト)でOKみたいです。

※コメント投稿者のブログIDはブログ作成者のみに通知されます