








昨日の記事の続きです。
表からみるとタクトスイッチが2つついているだけのように見えますが、実は裏側はこうなっています。
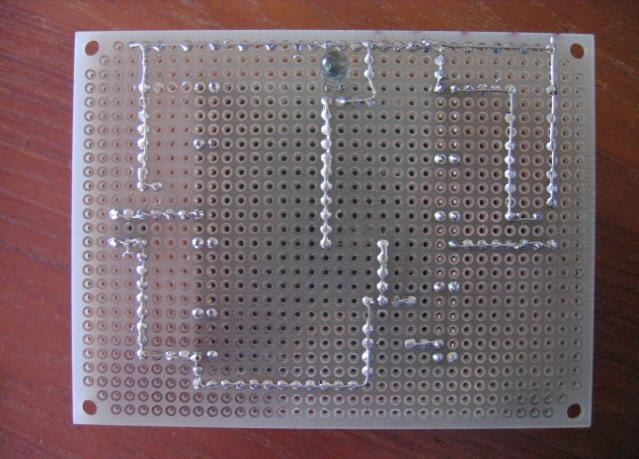
中央上側に載っている緑がかったものは赤外線発光ダイオードです。こいつをドライブするための2SC1815(と電流制限抵抗)がオマケ基板の下に隠れています。たしか、昨年のInterfaceにV850で学習リモコンを作る記事がありましたが、ほとんど同じような回路だったと思います。
こんな工作で作ってみたのが、Q-STEER用のリモコンです。誰でもやりそうなネタなんですけど、結構楽しめます。前後の動きはタクト・スイッチで操作し、左右の動きは基板の傾きを加速度センサで検出して制御することにしてみました。基板に載っているのは3軸の加速度センサですが、ソフトではX軸しかみていません。実際の動きを動画でご覧ください。
表からみるとタクトスイッチが2つついているだけのように見えますが、実は裏側はこうなっています。
中央上側に載っている緑がかったものは赤外線発光ダイオードです。こいつをドライブするための2SC1815(と電流制限抵抗)がオマケ基板の下に隠れています。たしか、昨年のInterfaceにV850で学習リモコンを作る記事がありましたが、ほとんど同じような回路だったと思います。
こんな工作で作ってみたのが、Q-STEER用のリモコンです。誰でもやりそうなネタなんですけど、結構楽しめます。前後の動きはタクト・スイッチで操作し、左右の動きは基板の傾きを加速度センサで検出して制御することにしてみました。基板に載っているのは3軸の加速度センサですが、ソフトではX軸しかみていません。実際の動きを動画でご覧ください。








ところで加速度センサの出力を積分して角度を計算しているんですよね? ニュートラルはどうやって検出するんでしょう?
あるていどの間隔をとってサンプリングして平均をとってやると静的加速度を測ることができます。XoutはX軸方向の重力加速度を測ることになるので、基板の左右の傾きを検出できます。ハンドルみたいに左右に廻した場合でも、基板を下向きぎみにしていれば、それなりにX軸方向にも傾くので操作ができるというだけのことです。
Gainerの次の説明が参考になります。
http://gainer.cc/wiki/index.php?title=Tutorial/Basic/MaxMSP/04/ja
Q-STEERのリモコン操作では回転角度を変化させることができるわけでもなく、単に「右折」と「左折」があるだけです。そのため、ある程度以上傾いたら「右折」または「左折」の信号を出し、傾きが戻ったら「直進」の信号を出すだけです。
実際に基板をPCにつなげて、カエルデモの出力をシリアルで見てみれば、加速度センサの値が変化することが確認できますよ。