








〇重力天体への高精度着陸技術を小型探査機で実証する
SLIM (Smart Lander for Investigating Moon) プロジェクトは、将来の月惑星探査に必要な高精度着陸技術を小型探査機で実証する計画です。
この技術を実証することで、我々人類が進める重力天体探査は、従来の「降りやすいところに降りる」探査ではなく、「降りたいところに降りる」探査へと非常に大きな転換を果たすことになります。
SLIMのような小型探査機による着陸実証は世界的にもユニークです。
SLIMプロジェクトを実現することで、月よりも重量リソース制約の厳しい惑星への着陸も現実のものとなってきます。
また、将来月面からのサンプルリターンを実施する場合、月面からSLIM級の大きさのリターン機を打ち上げれば、はやぶさ等と同程度の大きさのカプセルを地球に送り返すことができるようになると考えています。
SLIMプロジェクトは、JAXA宇宙科学研究所のメンバーを中心としつつ、全国の大学等の研究者が集まり、一体となって検討・開発を進めています。
〇高精度着陸と軽量探査機
SLIMは、具体的には以下の二つの目的を達成することで、将来の月惑星探査に貢献することを目指しています。
- 小型の探査機によって、月への高精度着陸技術の実証
- 従来より軽量な月惑星探査機システムを実現し、月惑星探査の高頻度化
高精度着陸は、将来の太陽系科学探査において必須とされています。
昨今、対象となる天体についての知見が増え、探査すべき内容が今までより具体的になっているからです。
そのため、ただ着陸するだけではなく、SLIMで目指すような高精度の着陸技術が必要となります。
また、将来の太陽系科学探査においては観測装置の高度化が必要となります。そのためには、探査機システムを軽量化し、その分、観測装置にリソース配分をすることが必要となってきます。つまり、SLIMの軽量化技術は、将来の太陽系探査の要求に応えることができます。
上記の目的を達成するために、様々な新技術を導入しています。
〇機体
SLIMは限られたリソース(許容重量)、ユニークな着陸方法ゆえに少し変わった形をしています。
低リソースで難しい場所に着陸するために最適化された形となっています。
〇月までの軌道
SLIMは限られたリソース(許容重量)を各コンポーネントにうまく割り当てて月を目指します。
その対象には、月へ辿り着き、着陸するまでに必要な推進薬も含まれます。
そこで、SLIMでは下図のような軌道
を検討しています。
地球の周りを周回しながらタイミングを見計らい、遠地点(=地球とSLIM探査機が一番離れる点)を月軌道の距離まで押し上げます。その後、月の近傍を通過する際に月の重力を利用して軌道変更する月スイングバイを行い、遠地点高度をさらに上げます。月スイングバイ後は、太陽潮汐力を利用して月との会合ポイントへ到達します。
〇着陸シーケンス
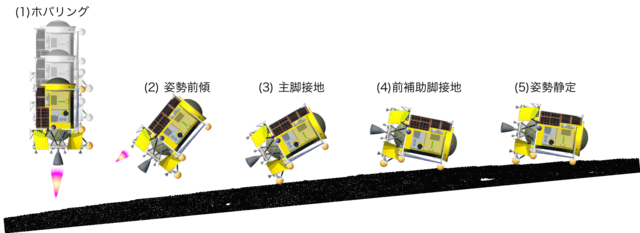
- 着陸シーケンス開始前 : 月周回楕円 600km × 15km
- シーケンス開始前・月周回楕円軌道において、地上からSLIMの軌道・位置を決定し、SLIMに通知します。その情報をもとに、SLIMは高度15kmの地点(近月点)でメインエンジンの逆噴射(探査機進行方向とは逆方向に噴射)を開始し、着陸シーケンスに移行します。
- 動力降下フェーズ : 高度 15km→3.5km
- 着陸シーケンスのひとつ目は動力降下フェーズです。
- 動力降下フェーズ中には、開始・終了時を含めて合計4回、約50秒間の「コースティング」期間を設け、その間はSLIMに搭載したカメラが月面搭載となるように姿勢を調整します。
- コースティング期間中に、カメラで月表面を撮影、その画像から自分がいる位置・速度を高精度に推定し、併せて、着陸点へ向かう軌道の再設計を搭載計算機上で行います。
SLIMはこのような自動制御により着陸地点の上空に到達します。 - 垂直降下フェーズ : 高度 3.5km → 0m
- SLIMは着陸地点の上空に到達後、着陸レーダにより高度を検出しながらほぼ垂直に降下します。
- 障害物検知 : 高度 約50m
- 垂直降下フェーズの途中、ある高度(例えば約300m)において「障害物検知」を実施し、探査機直下の障害物の状況に応じて水平位置の微調整を行います。
- メインエンジンをカットオフ : 高度 約3m
- 月面近く(例えば高度約3m)に達した時点でメインエンジンをカットオフし、姿勢制御を行いつつ着陸します!!







※コメント投稿者のブログIDはブログ作成者のみに通知されます