








今日の到着物は
ワンコインブラシレスモーター4個
格安2Gノートメモリー
車用LEDルームランプ10個
X400コアレスモーター

前回関連記事
やっとX400コアレスモーター到着したので早速ジャンクX400に装着

基板交換してLEDとモーターコネクター配線完了、SWは直アッパーボディに取り付け
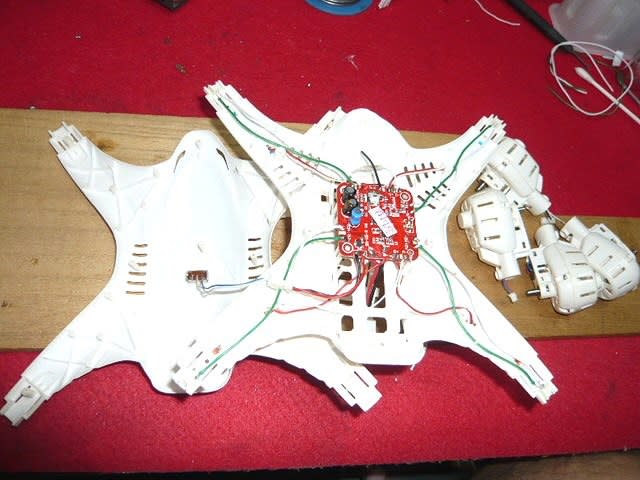
X8Cのプロポでバインド成功しモーター動作および回転方向確認

でペラガードとペラなど取り付け完成
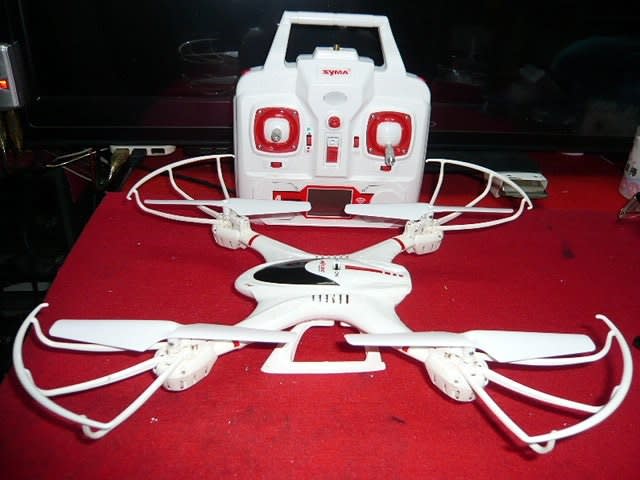
X8Cのプロポは大型機体用なので動作がとろい、がMODE2(スポーツモード)に切り替えるととても快調でした
このX400機体にX5C基板では非常に据わりが良いと思いきやレスポンスもかなり良い!!
満充電してYoutubeにアップするかもしれません。
充電完了し室内テストで気になったのはやはりゲーコン用のコントロールユニットなのでスロがシビアに反応(上下)します
そこで機械的には時間が掛かるので電気的にスロの反応を鈍くしました←HUBSANの様な感じにしようかと
原理は単純でスロのボリューム(半固定抵抗)は3端子で両端が+/GNDで端子の中点が両端端子に対して抵抗変化する
レバー角に対し比例した抵抗変化で電圧値変化(アナログ)しデジタルされコントローラーから制御されます、無駄に長くなりました
結局スティックレバーの急激な動きに対する電圧変化を遅延する事が要点
中学生の技術で普通にラジオ制作学んだ時、う~~ん今は理工系の授業聞かないか~~また余談・・・
で単に充放電できるコンデンサーを使用しただけです、遅延だけでなく放電(電圧降下)は曲線的なのでVERY GOOD!!
容量が大きくなれば放電時間も長くなる、極端に容量が多ければ数秒後に反応とか(笑)
で容量を変えて47MFが当方のベストでした、本当詳しく話したいのですが今の時代長話は嫌われるので~~~
トグルスイッチやボリュームを装備するともっと使い勝手が良くなるでしょうね、但しトイドローンなのでそこまでは~~

*このプロポはMODE2からMODE1に改造しているのでご注意!!
間違ってエレベーター側に大きなコンデンサー入れて1秒後に反応とかで笑えました(汗)
で再度室内テストでぴたり定点ホバーリングトイプロポなコントロール解像度なのでスムーズなホバーは無理ですね、ピクピク!!
でも今までのトイドローンの中で自立安定性は過去最高でした!!
MJXandSYMAコラボバージョン終わり
ワンコインブラシレスモーター4個
格安2Gノートメモリー
車用LEDルームランプ10個
X400コアレスモーター
前回関連記事
やっとX400コアレスモーター到着したので早速ジャンクX400に装着
基板交換してLEDとモーターコネクター配線完了、SWは直アッパーボディに取り付け
X8Cのプロポでバインド成功しモーター動作および回転方向確認
でペラガードとペラなど取り付け完成
X8Cのプロポは大型機体用なので動作がとろい、がMODE2(スポーツモード)に切り替えるととても快調でした
このX400機体にX5C基板では非常に据わりが良いと思いきやレスポンスもかなり良い!!
満充電してYoutubeにアップするかもしれません。
充電完了し室内テストで気になったのはやはりゲーコン用のコントロールユニットなのでスロがシビアに反応(上下)します
そこで機械的には時間が掛かるので電気的にスロの反応を鈍くしました←HUBSANの様な感じにしようかと
原理は単純でスロのボリューム(半固定抵抗)は3端子で両端が+/GNDで端子の中点が両端端子に対して抵抗変化する
レバー角に対し比例した抵抗変化で電圧値変化(アナログ)しデジタルされコントローラーから制御されます、無駄に長くなりました
結局スティックレバーの急激な動きに対する電圧変化を遅延する事が要点
中学生の技術で普通にラジオ制作学んだ時、う~~ん今は理工系の授業聞かないか~~また余談・・・
で単に充放電できるコンデンサーを使用しただけです、遅延だけでなく放電(電圧降下)は曲線的なのでVERY GOOD!!
容量が大きくなれば放電時間も長くなる、極端に容量が多ければ数秒後に反応とか(笑)
で容量を変えて47MFが当方のベストでした、本当詳しく話したいのですが今の時代長話は嫌われるので~~~
トグルスイッチやボリュームを装備するともっと使い勝手が良くなるでしょうね、但しトイドローンなのでそこまでは~~
*このプロポはMODE2からMODE1に改造しているのでご注意!!
間違ってエレベーター側に大きなコンデンサー入れて1秒後に反応とかで笑えました(汗)
で再度室内テストでぴたり定点ホバーリングトイプロポなコントロール解像度なのでスムーズなホバーは無理ですね、ピクピク!!
でも今までのトイドローンの中で自立安定性は過去最高でした!!
MJXandSYMAコラボバージョン終わり








