適当に撮った動画なのでメリハリなくごめんなさい。こんな感じでやってます風景です。実際ソロ計測は動画撮影に気が回らないんです。とりあえずここにupしました。
別途、計測の様子に特化した動画でも撮ろうと思ってます。
こんな機材を使ってます。


これ計測セット。IC-705、NanoVNA、アッテネータ2種、モノポールアンテナ、小物、ドローンはDJI MavicAir2・バッテリー3個体制(1個公称約30分、計測動作で実質20分)です。

アッテネータは、左0~70db(10dbステップ)と右0~110db(1dbステップ)です。どっちもに校正済です。

ドローン上部にNanoVNAを配置します。輪ゴムはドローン本体との摩擦維持、兼クッションです。画像や動画にあるように、Nano君の上にアンテナ基台を乗せ、基台とドローン機体を輪ゴムで固定させてできあがりです。(機体下部は各種センサーがあるので輪ゴムでマスクしないこと)

NanoVNAの配置は注意が必要です。以下重要。
Nano君が機体のGPSモジュールを遮蔽するとGPSからの位置情報が取れず自動RTH(リターンツーザホーム)が機能しなくなります。このとき(アラーム等に気づかず)RTHを実行してしまうと、その現在位置で着陸を実行し大変悲しい結末を迎えます。一般のドローン操縦者はヤバイ時は自動RTH!がクセになってるので冷静な判断が必要です。飛行途中にGPS情報を喪失する場合もあるので、基本RTHで帰還させず必ず目視操縦で戻す前提とします。これと同じ位置にGoProカメラ等を搭載しGPSロストでまとめて海の仏様になった例を見たことがあります。GPSモジュールをマスクしない取付方法はいろいろアイデアがあるので創意工夫ですね。

NanoVNAのCW機能で所望のキャリアを発生させます。私のNano君は旧モデルサイズでバッテリー内臓型です。CW連続発振させても5時間以上動作します。新モデル(スクリーンがでっかくなったやつ)でサイズが大きい版を使う場合はドローンに抱けるか確認が必要です。CW出力はネット情報によると旧モデルは~-10dbm程、新モデルは~0dbm程あるそうです。

これは430Mhz用のモノポールアンテナ(アルミ線)と100均綿棒ケース。側面ネジは固定用輪ゴムかけ。当初ケースをグランド面で囲みVSWRの最適化を行いましたが、実測上グランド面の有無で信号強度差はほぼないので外しました(機体のGPS遮蔽面積も増えちゃうし)。また、垂直面の半値幅は理論上約80度ですがVSWRが悪い方が点波源的球形放射に近くなり逆に幸いしてます。このモノポールのままでHF~430MHzまでのアンテナを計測をしましたが計測対象が水平偏波アンテナでもいける感じです。勿論厳密性を追求する場合は気のすむまで工夫してください。
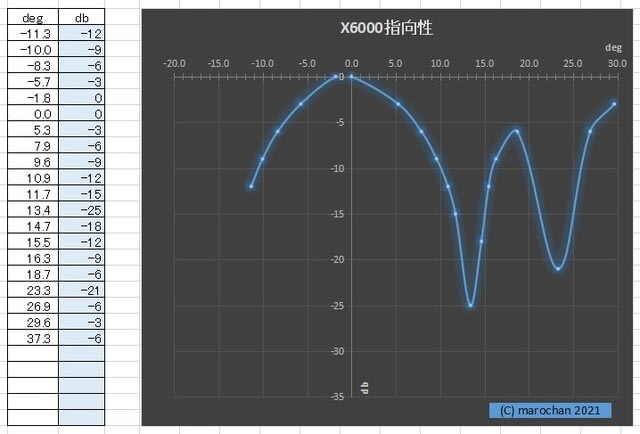
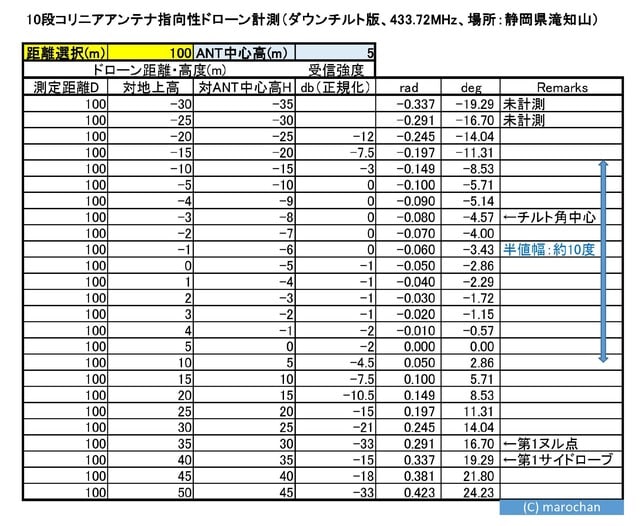
下は別記事でも紹介した測定の一例。詳細は記事をご覧ください。


転ばぬ先の注意事項などなど:
一般的なドローン空撮より何倍も気を使います。ドローン座標操作とアッテネータ操作に体感8割方集中力が割かれます。空撮はドローン操縦モニタを見ながら飛ばし神経一本で済みますが、アンテナ計測では受信機の信号強度を見ながら飛ばし、ながらATT操作、ながら記録、ながら操縦モニタリング、神経4倍、手が4倍です。
・予備飛行1:計測体制が整ったら、一度ドローンを飛行させ仰角(EL)と方位角(AZ)位置を色々変え信号強度パターンが想定に近いかと、周辺の電波環境を確認します。障害物が無いように見えても思わぬ場所からの反射があると部分的に特異なパターンが観測できます。反射フリーなエリアが確保できたら、おおよその計測範囲で機体を飛行させ本測定に必要な1シーケンス時間と位置限界(特に±EL)を把握しておきます。範囲内に危険要因が無いことも再確認します。(地上の樹木等は当然ですが山間部の好適地はパラグライダーや意識の高い猛禽類の迎撃に注意。海ではサーファーや釣り師に注意)
・予備飛行2:予備飛行中、指向性のピーク、ヌルポイントがどのへんにあるか判るので、その時の距離、EL値、AZ値をメモっておきます。また、主ビームの中心で信号強度が目標のレベル(正規化の基準値となる)になるようにアッテネータを仮調整しておきます。ヌルボトムを気持ちよく取るには40db程度の深さが必要です。
・本測定:(垂直パターン計測の場合)
- 遠方界の測定なので測定距離はアンテナ素子長より十分長くします。(推奨:V/UHF=100m~500m、HF=500m~*Km)これより短くても可能ですが概ね最低10λ以上でパターンが暴れない距離を確保。また、測定距離が短いほど水平距離よりEL距離が長くなり、EL角による信号強度補正の検討が必要になります。推奨距離なら問題ないです。(HFで生打上角を取るときなど高度が航空法制限150m以上となる場合は国交省DIPSで許可を取りましょう)
- メインローブ、サイドローブ、ヌルポイントを計測するため、測定距離位置でのドローンの高度可変範囲が、所望の垂直パターン範囲となるか確認します。事前にエクセル等で距離・高度・EL角対応テーブルを作っておくと便利です。
- 予備飛行で見つけた特徴点(メイン・サイドローブのピーク、ヌルポイント等)は必要により密測定を行います。一定の高度変化で強度を測定するか、一定の強度変化(特徴点付近は1dbステップ、その他は3dbステップ等)でその時の高度を測定するか、等、やり方は色々。
- 測定時、エクセル等に直接記録するとグラフ機能でリアルタイムにパターンが仕上がって行きます。グラフを見ながら不自然なカーブが見つかるとその点を再測定します。私は手が足らないので一旦紙記録しています。あとはアンテナシミュレーションソフトやメーカー発表のパターンと比較し妥当性を吟味、生データの活きの良さにニタニタ、自然の中でとれたものは味に深みがあり、グラフを見ながら楽しく飲めます。
- 風の影響について、430MHzの例だとアンテナの10cm単位の揺れで信号強度に有意差が生まれます。V/U/SHFでの測定は風速~3m/s内、アンテナは極力固縛が適切です。ドローンのホバリング位置精度は大変優秀でこの程度の風速ならほぼ影響しません。最大8m/sでも実験しましたがHFなら気になりません。
ミリミリ書きましたが、当たり前のことに注意していれば測定は簡単です。
その他:
ドローン飛行中、機体下部に白いフックが見えますが、この計測には関係ありません。海上でカジキやマグロを釣るときにタックルフックとして使ってます。
ドローンGPSモジュールが遮蔽されGPS情報が得られないと、操縦モニタ上の距離D(m)が喪失します(MavicAir2の場合)。当然ホームポイント更新も機能しなくなります。。この場合、距離を確定するには、一旦Nano君とアンテナを搭載しないで飛行させジンバルカメラを90度下方チルト、直下の目印を決め距離を取得、測定時は同じ目印にドローンを運び計測します。海上は別の方法があり。
~~ハッピービーミング(^^♪~~