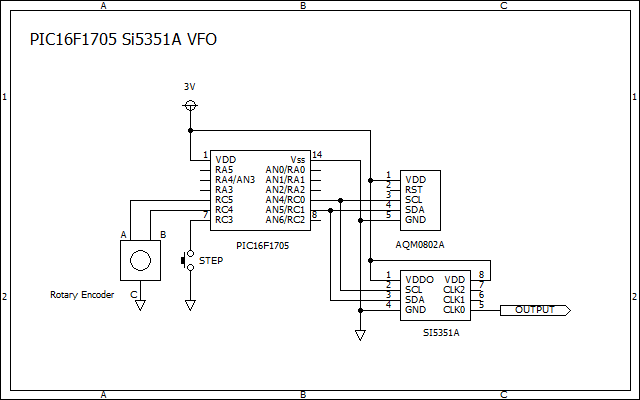
PIC16F1705で3チャンネルクロックジェネレータSi5351Aをコントロールして、VFOを作ってみます。
表示は、I2C LCD AQM0802Aを使い、ロータリーエンコーダで周波数を変えます。
周波数ステップは、STEPボタンを押すたびに1MHz,100KHz,10KHz,1KHzと変化し、もう一度押すと1MHzに戻ります。
回路図です。電源は乾電池(3V)です。I2Cのプルアップ抵抗は、AQM0802Aモジュールに内蔵されているので、つけていません。ロータリーエンコーダを接続するRC4,RC5とSTEPボタンを接続するRC3は、PIC側でウィークプルアップしています。
ブレッドボードです。周波数の初期値は1MHzで、STEPの初期値は1MHzです。
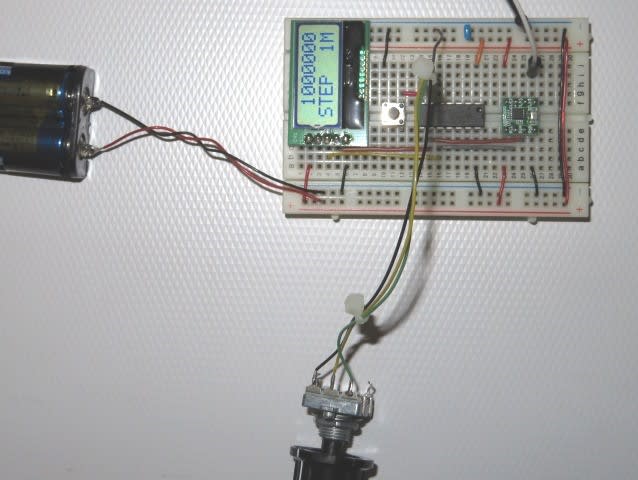
50MHzを発生さ、自作の周波数カウンタで周波数を測定しています。
Si5351Aの負荷容量は、8pFとしていますが、若干低い周波数で発振しています。

プログラムです。
周波数の初期値は、1MHzとしてあります。このVFOをアマチュア無線の無線機等に利用する場合は、周波数は希望の周波数に設定し、STEPも目的に合わせて、設定してください。
このプログラムで、発生可能な周波数は、500KHz~150MHzです。(100MHz以上では、AQM0802Aでは表示できません)
私の自作周波数カウンタでは、約70MHzまでしかカウントできませんでしたが、無線機で聞いてみると100MHz以上もちゃんと発振しているようです。
なお、今回は、xc8 v2.00でコンパイルしてみました。
xc8 v1.45の場合は、割り込みルーチンを void interrupt isr() と記述してください。
--------------------------------------------------
/*
* File: main.c
* Author: JH7UBC Keiji Hata
* PIC16F1705 Si5351A VFO
* Created on 2019/04/22
*/
#include <stdio.h>
#include <stdlib.h>
#include <xc.h>
// CONFIG1
#pragma config FOSC = INTOSC //内部クロックを使う
#pragma config WDTE = OFF //ウォッチドックタイマー無効
#pragma config PWRTE = ON //パワーアップタイマーを有効にする
#pragma config MCLRE = OFF //MCLRピンをRA3として使用する
#pragma config CP = OFF //プログラムメモリを保護しない
#pragma config BOREN = ON //ブラウンアウトリセットを有効にする
#pragma config CLKOUTEN = OFF //クロック出力を無効とし、RA4ピンとして使用する
#pragma config IESO = OFF //内部・外部クロックの切り替えでの起動を行わない
#pragma config FCMEN = OFF //外部クロックを監視しない
// CONFIG2
#pragma config WRT = OFF //フラッシュメモリを保護しない
#pragma config PPS1WAY = OFF //ロック解除シーケンスで何度でもPPSLOCKをセット/クリアできる
#pragma config ZCDDIS = ON //ゼロクロス検出回路無効
#pragma config PLLEN = ON //×4PLLを動作させる
#pragma config STVREN = ON //スタックオーバーフローリセットを行う
#pragma config BORV = HI //ブラウンアウトリセット電圧を高(2.7V)に設定
#pragma config LPBOR = OFF //低消費電力ブラウンアウトリセット無効
#pragma config LVP = OFF //低電圧プログラミングを行わない
#define _XTAL_FREQ 32000000 //クロック32MHz
/* ロータリーエンコーダ関係定義*/
#define ECA RC5 //エンコーダA
#define ECB RC4 //エンコーダB
volatile unsigned char curDat;
volatile unsigned char befDat;
volatile signed char count= 0;
/* LCD関係定義 */
#define LCD_addr 0x7C //3E+0
#define LCD_LINE1 0x80
#define LCD_LINE2 0xC0
/* Si5351A関係定義*/
#define Si5351_ADDR 0xC0 //60<<1
#define MSNA_ADDR 26
#define MS0_ADDR 42
#define CLK0_CTRL 16
#define CLK1_CTRL 17
#define CLK2_CTRL 18
#define OUTPUT_CTRL 3
#define PLL_RESET 177
#define XTAL_LC 183
unsigned long Freq = 1000000; //周波数初期値 1MHz
unsigned long Freq_old; //周波数の前の値
const unsigned long XtalFreq = 25000000; //水晶発振器の周波数
unsigned long divider;
unsigned long PllFreq;
unsigned int mult;
unsigned long l;
float f;
unsigned long num;
const unsigned long denom = 1048575;
unsigned long P1;
unsigned long P2;
unsigned long P3;
/* STEP関係設定 */
unsigned long Step = 1000000; //STEP初期値1MHz
#define STEP_SW RC3
/* I2C initialize */
void I2C_init(){
SSP1CON1 = 0x28; //SSPEN = 1,I2C Master Mode
SSP1STATbits.SMP = 1; //標準速度モード(100KHz)
SSP1ADD = 0x4F; //Fosc/(4*Clock)-1 Clock=100kHz,Fosc=32MHz
}
/* Start condition */
void I2C_start(){
SSP1CON2bits.SEN = 1;
while(SSP1CON2bits.SEN);
}
/* Stop condition */
void I2C_stop(){
SSP1IF = 0;
SSP1CON2bits.PEN = 1;
while(SSP1CON2bits.PEN);
SSP1IF = 0;
}
/* Send 1byte to I2C */
void I2C_write(unsigned char dat){
SSP1IF = 0;
SSP1BUF = dat;
while(!SSP1IF);
}
/* Write command */
void LCD_cmd(unsigned char cmd){
I2C_start(); //start condition
I2C_write(LCD_addr); //send slave address
I2C_write(0x00); //send control byte
I2C_write(cmd); //send command
I2C_stop(); //stop condition
}
/* Write charactor */
void LCD_char(unsigned char dat){
I2C_start(); //start condition
I2C_write(LCD_addr); //send slave address
I2C_write(0x40); //send control byte
I2C_write(dat); //send data
I2C_stop(); //stop condition
}
/* LCD initialize */
void LCD_init(){
__delay_ms(40); //40ms wait
LCD_cmd(0x38); //8bit,2line
LCD_cmd(0x39); //IS=1 : extention mode set
LCD_cmd(0x14); //Internal OSC Frequency
LCD_cmd(0x70); //Contrast set
LCD_cmd(0x56); //Power/ICON/Contrast Control
LCD_cmd(0x6C); //Follower control
__delay_ms(200);//200ms wait
LCD_cmd(0x38); //IS=0 : extention mode cancel
LCD_cmd(0x0C); //Display ON
LCD_cmd(0x01); //Clear Display
__delay_ms(1); //wait more than 1.08ms
__delay_us(80);
}
/* Return Home */
void LCD_home(){
LCD_cmd(0x02);
__delay_ms(1);
__delay_us(80);
}
/* Locate cursor x,y */
void LCD_cursor(unsigned char x,unsigned char y){
if (y == 0){
LCD_cmd(LCD_LINE1+x);
}
if (y == 1){
LCD_cmd(LCD_LINE2+x);
}
}
/* write 1 charactor to LCD */
void putch(unsigned char ch){
LCD_char(ch);
}
/* Si5351A関係関数*/
/* Send data to Si5351A register*/
void Si5351_write(unsigned char Reg , unsigned char Data)
{
I2C_start();
I2C_write(Si5351_ADDR);
I2C_write(Reg);
I2C_write(Data);
I2C_stop();
}
/* Si5351A initialize */
void Si5351_init(){
Si5351_write(OUTPUT_CTRL,0xFF); //Disable all output
Si5351_write(CLK0_CTRL,0x80); //CLOCK0 power down
Si5351_write(CLK1_CTRL,0x80); //CLOCK1 power down
Si5351_write(CLK2_CTRL,0x80); //CLOCK2 power down
Si5351_write(XTAL_LC,0x80); //Crystal Load Capasitance=8pF
Si5351_write(PLL_RESET,0xA0); //Reset PLLA and PLLB
Si5351_write(CLK0_CTRL,0b01001111); //CLOCK0 Power up 8mA
Si5351_write(OUTPUT_CTRL,0xFE); //Enable CLOCK0
}
/* Send parameter to register */
void Parameter_write(unsigned char REG_ADDR,unsigned long Pa1,unsigned long Pa2,unsigned long Pa3)
{
Si5351_write(REG_ADDR + 0,(Pa3 & 0x0000FF00) >> 8);
Si5351_write(REG_ADDR + 1,(Pa3 & 0x000000FF));
Si5351_write(REG_ADDR + 2,(Pa1 & 0x00030000) >> 16);
Si5351_write(REG_ADDR + 3,(Pa1 & 0x0000FF00) >> 8);
Si5351_write(REG_ADDR + 4,(Pa1 & 0x000000FF));
Si5351_write(REG_ADDR + 5,((Pa3 & 0x000F0000) >> 12) | ((Pa2 & 0X000F0000) >> 16));
Si5351_write(REG_ADDR + 6,(Pa2 & 0x0000FF00) >> 8);
Si5351_write(REG_ADDR + 7,(Pa2 & 0x000000FF));
}
/* Set frequency */
void VFO_set(unsigned long frequency){
/* Set PLLA */
divider = 900000000 / frequency;
divider >>= 1; //dividerは整数かつ偶数
divider <<= 1;
PllFreq = divider * frequency;
mult = PllFreq / XtalFreq;
l = PllFreq % XtalFreq;
f = l;
f *= denom;
f /= XtalFreq;
num = f;
P1 = (unsigned long)(128 * ((float)num /(float)denom));
P1 = (unsigned long)(128 * (unsigned long)mult + P1 - 512);
P2 = (unsigned long)(128 * ((float)num / (float)denom));
P2 = (unsigned long)(128 * num -denom * P2);
P3 = denom;
Parameter_write(MSNA_ADDR,P1,P2,P3);
/* Set MS0 */
P1 = 128 * divider - 512;
P2 = 0;
P3 = 1;
Parameter_write(MS0_ADDR,P1,P2,P3);
}
/* Display Frequency */
void Freq_disp(unsigned long frequency){
LCD_home();
printf("%8ld",frequency);
}
/* Display Step */
void Step_disp(unsigned int stp){
LCD_cursor(4,1);
switch(stp){
case 1000000:
printf(" 1M");
break;
case 100000:
printf("100K");
break;
case 10000:
printf(" 10K");
break;
default:
printf(" 1K");
break;
}
}
/* Change Step */
void Step_change(){
__delay_ms(5);
if(Step == 1000){
Step = 1000000;
}else{
Step = Step/10;
}
Step_disp(Step);
while(!STEP_SW){
__delay_ms(5);
}
}
/* Interrupt Service Routine */
void __interrupt isr(){
IOCIF = 0; //割り込みフラッグクリア
IOCCF4 = 0;
IOCCF5 = 0;
__delay_ms(2);
curDat = ECA + (ECB<<1);
if (befDat != curDat){
unsigned char d = ((befDat<<1)^curDat) & 3; //回転方向判定
if(d < 2){
count++;
}else{
count--;
}
befDat = curDat;
}
if(count >= 4){
Freq += Step;
count = 0;
}else if(count <= -4){
Freq -= Step;
count = 0;
}
}
/* Main program */
void main() {
OSCCON = 0b01110000 ; // 内部クロック8MHz ×4=32MHz
ANSELA = 0b00000000 ; // AN0-AN3を使わない
ANSELC = 0b00000000 ; // AN4-AN6を使わない
TRISA = 0b00000000 ; // PORATは全て出力
TRISC = 0b00111011 ; // RC0,RC1,RC3RC4,RC5は入力、RC2は出力
PORTA = 0b00000000 ; // PORTAクリア
PORTC = 0b00000000 ; // PORTCクリア
/* I2Cピン設定 */
RC0PPS = 0x10; //RC3をSCLに割り当てる(出力)
SSPDATPPS = 0x11;//SSPDATにRC4を割り当てる(入力)
RC1PPS = 0x11; //RC4をSDAに割り当てる(出力)
/* ロータリーエンコーダ関係設定 */
OPTION_REGbits.nWPUEN=0; // ウィークプルアップ許可
WPUC = 0b00111000; // RC3,RC4,RC5をプルアップ
/* IOC割り込み設定 */
IOCCN = 0b00110000; //RC4,RC5立下り割り込み設定
IOCCP = 0b00110000; //RC4,RC5立ち上がり割り込み設定
IOCIE = 1; //IOC割り込み許可
PEIE = 1; //周辺割り込み許可
GIE = 1; //全割り込み許可
I2C_init();
LCD_init();
Si5351_init();
/* Roatry Encoder 初期値 */
befDat = ECA + (ECB<<1);
Freq_disp(Freq);
VFO_set(Freq);
Freq_old = Freq;
LCD_cursor(0,1);
printf("STEP");
Step_disp(Step);
while(1){
if(STEP_SW == 0){
Step_change();
}
if(Freq != Freq_old){
VFO_set(Freq);
Freq_disp(Freq);
}
Freq_old = Freq;
}
}