micro:bitに内蔵されている加速度センサーを利用して、micro:bitの姿勢や動きを検知することができます。
accelerometer.current_gesture()は、
up down left right は、どちらに傾いているか
face up face down は、どちらの面が上か
shake は、ゆさぶられたか
free fall 3g 6g 8g は、重力加速の値を
検知した結果を文字で返します。
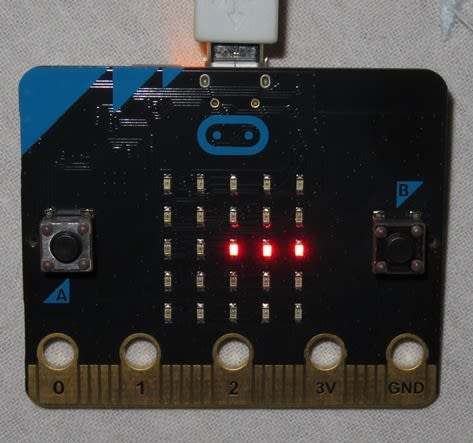
現在の状態や動きをシリアル通信でパソコンに送って表示するスクリプトです。(パソコンのソフトはTeraTermで通信速度は9600bpsです)

姿勢や動きがTeraTermに表示されます。(状態や動きが変わったときだけ表示されます)