








前回からの続き
ロボット工学の床面重心バランスZMPのスペクトルで、ある程度の診断が可能かもしれない・・・
少しずつ分かってきました。
現代人の多くの悩みの一つ、腰痛の診断を実施してみたいと思います。
「先輩は腰痛は無いですか・・・」
「あるある・・・実は今も腰が痛いんだ・・・・」
「ならば丁度いい!測定と整体治療を行ってみましょう。」
「おい!俺を実験台にするな・・・・」
そして・・・・
「お疲れ様でした。以下の図を見てください。」


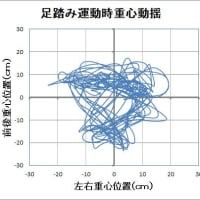
「これは?リサージュ図形・・・俺の床面重心バランスだな・・・」
「そうです。左が腰痛あり、右が整体により腰痛が改善したリサージュ図形です。」
「な~だ!同じような形じゃないか・・・・」
「そうです。リサージュでは同じような形です。しかしこれを高速フーリエ変換し、スペクトルでみると・・・」


「上が腰痛あり、下が腰痛改善のスペクトルです。1Hzの足踏みの場合、前後の揺れの周波数はだいたい2Hzです。
先輩の場合1Hzにピーク値が確認できます。つまり足踏み一度に前後に異常な動き・・・つまり腰のねじれが発生していると想定できます。」
「・・・・?」
「よって今回は腰のねじれを取る整体を実施しました。すると異常なピーク値が無くなり、腰痛か改善したと言う事です。」
「なるほどね・・・・これで患者さんの異常を予測し、予防に役立てようと言う事だな。」
「その通りです。今度はもう少しスペクトルを吟味してゆきたいと思っています。」
「面白そうだ!頑張れよ!」








難しい問題ですね。(笑)
今回の測定法は技術士の先生から
「是非特許取得するように・・・」
とのアドバイスで出願しました。
出願の目的は
真似されないこと・・・
ですが、もう一つの目的は堂々と発表するためです。
発表後、他の方に真似され特許出願された場合、自分で自分の首を絞めることになるからです。
大学の研究で使用されたい・・・
との事ですが、使用されるときは一応ご連絡いただけると助かります。
現在はこのような形でしたお答えできません。
なにか情報がありましたら、またこちらのブログでご連絡いたします。
今後もよろしくお願いいたします。
これら測定法を特許出願されたとのことですが,もし私が同様の方法でZMPを計算し、研究に使ったとしたら、やはり問題となるのでしょうか。簡便でおもしろい方法なのでぜひやってみたいと思いましたが、その点が気になりました。連投になりましたが、再び教えて頂けるとありがたいと存じます。
ゼロモーメンポイントの計算式ですが、ご指摘の通りです。
A=前後、又は左右に発生した加速度測定値
Z=上下の加速度測定値(重力加速度を含む)
H=床面から加速度センサーの取り付いた位置
です。
これらは全て単純な掛け算です。
色々な条件に応用できると思います。
ロボット工学の先生が言われるには、
「これは仮のゼロモーメントポイントと言った方が良いのでは・・・」
どのご意見も有りました。
大学での研究は大変だと思いますが、今後とても重要となる可能性があります。
また新しい測定法を考案されましたら、特許出願するのも良いと思います。
私もこれら測定法を出願してから公開しました。
また何か情報、お問合せ等ありましたらご連絡ください。
今後もよろしくお願いいたします。
気温の変動が激しいので、体調には十分ご注意ください。
それでは。
そこでZMPの計算について分からない点がありましたので,教えていただけますでしょうか。A*H/ZでAは左右(X軸),前後(Y軸)でそれぞれの計測値であっていますでしょうか。Hは床から加速度計までの高さであっていますでしょうか。Zは上下(Z軸)の計測値であっていますでしょうか.*は単純かけ算であっていますでしょうか。
突然で申し訳ありませんが,可能な範囲で教えて頂けたら幸いです.宜しくお願いします.