前回からの続き
ロボット工学の床面重心バランスZMPのスペクトルで、ある程度の診断が可能かもしれない・・・
少しずつ分かってきました。
現代人の多くの悩みの一つ、腰痛の診断を実施してみたいと思います。
「先輩は腰痛は無いですか・・・」
「あるある・・・実は今も腰が痛いんだ・・・・」
「ならば丁度いい!測定と整体治療を行ってみましょう。」
「おい!俺を実験台にするな・・・・」
そして・・・・
「お疲れ様でした。以下の図を見てください。」


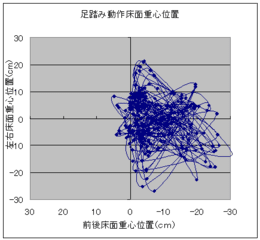
「これは?リサージュ図形・・・俺の床面重心バランスだな・・・」
「そうです。左が腰痛あり、右が整体により腰痛が改善したリサージュ図形です。」
「な~だ!同じような形じゃないか・・・・」
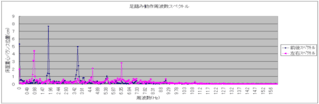
「そうです。リサージュでは同じような形です。しかしこれを高速フーリエ変換し、スペクトルでみると・・・」


「上が腰痛あり、下が腰痛改善のスペクトルです。1Hzの足踏みの場合、前後の揺れの周波数はだいたい2Hzです。
先輩の場合1Hzにピーク値が確認できます。つまり足踏み一度に前後に異常な動き・・・つまり腰のねじれが発生していると想定できます。」
「・・・・?」
「よって今回は腰のねじれを取る整体を実施しました。すると異常なピーク値が無くなり、腰痛か改善したと言う事です。」
「なるほどね・・・・これで患者さんの異常を予測し、予防に役立てようと言う事だな。」
「その通りです。今度はもう少しスペクトルを吟味してゆきたいと思っています。」
「面白そうだ!頑張れよ!」







 そう思ったんです。」
そう思ったんです。」