色々ありましたが、またブログに復帰したします。
これからは患者さんのデータを取り入れ、今までの理論的考察や数学モデルを参考に解析してゆきたいと思います。
「先日坐骨神経痛の女性が来られました。」
「坐骨神経痛・・・最近多いな・・・・どんな状態だったんだ?」
「40代の女性です。症状として右足のシビレがあり、現在左足先もしびれる状態です。1ヶ月前に整形外科で坐骨神経痛と診断されました。
他に肩こりと手の重み、冷え性、むくみ、膀胱炎の経験、そして便秘・・・・」
「ちょっとひどい状態だな~」
「そこで今回は最も症状が深刻な坐骨神経痛をロボット工学を活用し、診断してみようと思います。」
「よし!患者さんのために、大いにロボット工学を採用しよう。」
「整形外科では腰椎のS字カーブが普通の人より大きく、これが坐骨神経痛の原因だろう・・・と言われたそうです。」
「そうか・・・坐骨神経痛やギックリ腰は、腰部の椎間板にかかるせん断応力が一つの原因になる、と本で読んだ事がある。つまりS字カーブがきついと言う事は、大きなせん断応力が腰部にかかっていると言う事だな。」
「そうですね。私もそう思います。だからこれをロボット工学でさらに詳しく診断してみます。下の図を見てください。」

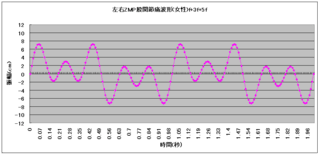
「患者さんの足踏み時の重心位置加速度を計測し、床面重心バランスZMPを求めてみました。」
「ちょっと変わった形だな~普通の人はハート型になるようだが・・・・」
「そうです。前後の動きが非常に大きい・・・つまり腰部に繰り返しの力がかかっている可能性があります。」
「そうか・・・つまり繰り返し加重がかかる・・・と言う事は材料学でいう疲労破壊と同じ考え方が出来る、と言う事か・・・」
「そうです。この患者さんは静的にはS字カーブのきつさによるせん断応力の増加、そして動的にかかる繰り返し荷重が、さらにその力を増大させている・・・と考えられます。」
「なるほど・・・正しいかどうかはまだはっきり分からないが、何かが見えてきたな。」
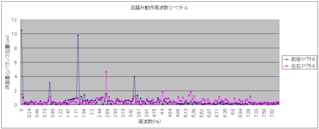
「次にスペクトルの図をご覧ください。この患者さんは約0.9Hzで足踏みをしています。よって前後の周波数はその2倍の1.8Hzになります。しかし前後のZMPに0.9HZ部分のピークがあります。明らかに腰がねじれています。」
(詳しい内容は09年8月31日「ロボット工学による腰痛の診断」を参照ください。)
「なるほど、それでこのデータを元に何をするんだ。」
「ここからが問題です。患者さんはデータ解析に来ているのではありません。身体を治しに来ているのです。このデータを元にどのような整体治療が必要か、考える必要があります。」
「難しい問題だ。」
「整体治療の問題になので、簡単にお話します。まずハムストリング(太ももの裏側)とふくらはぎをほぐし、腹部の指圧をして矯正する必要があります。整体後患者さんはかなり良くなられました。良かったです。」
「患者さんの感想を聞きたいな~」
「足のシビレが軽減しました。肩こり腰痛も治ったそうです。しかも体脂肪も減少し、顔のむくみも取れ、耳鳴りも治り、冷え性も便秘も改善した・・・・」
「おいおい、ちょっとオーバーだよ。」
「いいえ患者さんが本当にそうおっしゃるんです。本当かどうか追求しましたが・・・・」
「ははは~冗談だよ。ロボット工学をもっと患者さんのために役立ててくれ。」