








「先輩・・・今日は残念な知らせがあります。」
「どうしたんだ?」
「先日の患者さん・・・・検査の結果やはり子宮ガンでした。」
「・・・・・・」
「今あるデータ、この患者さんの左右ZMPですが、子宮ガン患者の左右ZMPと言わざるおえません・・・・」
「そうか・・・・残念だな・・・・」

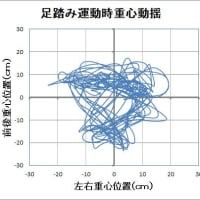
「以上がこの患者さんの左右ZMPスペクトルです。6回データをとりましたが、再現性は強いです。」
「結構同じような形になるもんだな・・・」
「そうなんです。生体の計測なのでもう少しバラツキがあると思ったのですか・・・・」
「これが診断に力を発揮してくれれば良いが、それはちょっと難しいかな?」
「そうですね。しかし頑張ってやって行きたいです。現代医学も大きく進歩しています。それに東洋医学とロボット工学を付け加えれば、もしかしたら新しい診断治療法が見つかるかもしれません。」
「そう信じて頑張って行こう!」








人間の姿勢安定性について、研究している学生です。
人間が歩行している時のzmpを求めたいと思っているのですが、そちらのブログで求めている日記があったので、コメントさせて頂きました。
そこで、もしよかったら、zmpの算出方法を教えて頂きたいのですが。
今研究で、歩行姿勢安定を評価している方法は、腰に加速度センサを付けて、加速度のデータを処理しています。
処理方法は、合成加速度を求め、そのベクトルを求めています。また、合成加速度をfftでかけて、1~3Hz付近の波形を見ています。
研究の目的としては、高齢者の転倒リスクをなるべく減らせるようなインソールの開発です。
急なコメント失礼しました。
ZMPについては、後日ご連絡いたしますので、よろしくお願いいたします。
何かありましたら、いつでもコメントください。
今後もよろしくお願いいたします。