前回からの続き
整体治療院で、患者さんの状態を診断するときに、実施されるのが安静立位時の姿勢です。
片方の肩が下がっていないか?
腰が曲がっていないか?
整体治療後にこれら身体の歪が改善されているか?
等を診断してゆきます。
しかし今まで、多くの患者さんを診てきて、気づいたことがあります。それは
姿勢が改善されても、症状は改善されず、治療効果も出ていない。
その反対に
姿勢はもとの状態だが、症状が改善され元気になった。
姿勢を改善することは、静力学的にも安定した状態であり、治療効果が出ても不思議ではありません。
しかし人体は複雑で、これだけでは不十分だと思われます。
そこで等技研では、身体の動きをロボット工学で解析することにしてます。
「姿勢が改善されても病気が再発するのは、動きに何らかの異常があるからだ?」
そう考えています。
これを根本から改善してくれるのが、ロボット工学の力だと思っています。
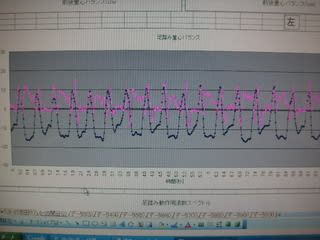
以下の足踏み時のZMP(ゼロモーメントポイント)データをご覧下さい。
左側が一般のZMP、右側が坐骨神経痛のZMPです。


図の左側が前方、図の上部が右側です。
坐骨神経痛のZMPは、前後に大きく重心バランスが変化しています。
整体を実施すると、東洋医学の理論により、一時的に「気の流れ」が良くなり、症状が改善されました。
しかしながら、このような動作をされていると、腰部の椎間板に繰り返しのせん断応力が働いてしまいます。
椎間板には血管がありません。
よって再生はされません。つまり椎間板は疲労破壊する可能性があります。
このブログはロボット工学を課題にしたブログなので、ここでは材料学の疲労破壊や、転位論を述べるつもりはありません。
しかしとても重要な問題だと思います。
それでは、どの様に考えていくか?
今の段階では、姿勢やZMP波形の平均値を整体で改善させることは可能です。
しかし同じ波形でも、スペクトルを改善させるのは容易ではありません。
「先生~痛いよ~・・・・助けて・・・・」
苦しんでいる患者さんをどのように救うか?
この鍵をロボット工学が握っているのでは・・・
そうに思えてなりません。
ZMPと坐骨神経痛、膝痛、股関節痛・・・
ロボット工学の先生方は、どのようにお考えでしょうか?
整体治療院で、患者さんの状態を診断するときに、実施されるのが安静立位時の姿勢です。
片方の肩が下がっていないか?
腰が曲がっていないか?
整体治療後にこれら身体の歪が改善されているか?
等を診断してゆきます。
しかし今まで、多くの患者さんを診てきて、気づいたことがあります。それは
姿勢が改善されても、症状は改善されず、治療効果も出ていない。
その反対に
姿勢はもとの状態だが、症状が改善され元気になった。
姿勢を改善することは、静力学的にも安定した状態であり、治療効果が出ても不思議ではありません。
しかし人体は複雑で、これだけでは不十分だと思われます。
そこで等技研では、身体の動きをロボット工学で解析することにしてます。
「姿勢が改善されても病気が再発するのは、動きに何らかの異常があるからだ?」
そう考えています。
これを根本から改善してくれるのが、ロボット工学の力だと思っています。
以下の足踏み時のZMP(ゼロモーメントポイント)データをご覧下さい。
左側が一般のZMP、右側が坐骨神経痛のZMPです。
図の左側が前方、図の上部が右側です。
坐骨神経痛のZMPは、前後に大きく重心バランスが変化しています。
整体を実施すると、東洋医学の理論により、一時的に「気の流れ」が良くなり、症状が改善されました。
しかしながら、このような動作をされていると、腰部の椎間板に繰り返しのせん断応力が働いてしまいます。
椎間板には血管がありません。
よって再生はされません。つまり椎間板は疲労破壊する可能性があります。
このブログはロボット工学を課題にしたブログなので、ここでは材料学の疲労破壊や、転位論を述べるつもりはありません。
しかしとても重要な問題だと思います。
それでは、どの様に考えていくか?
今の段階では、姿勢やZMP波形の平均値を整体で改善させることは可能です。
しかし同じ波形でも、スペクトルを改善させるのは容易ではありません。
「先生~痛いよ~・・・・助けて・・・・」
苦しんでいる患者さんをどのように救うか?
この鍵をロボット工学が握っているのでは・・・
そうに思えてなりません。
ZMPと坐骨神経痛、膝痛、股関節痛・・・
ロボット工学の先生方は、どのようにお考えでしょうか?