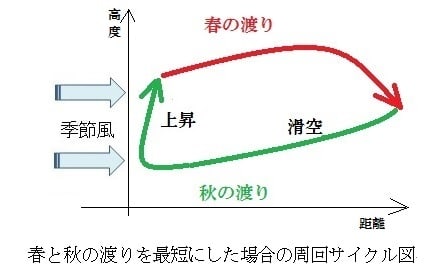
前回に続いて、サイクル滞空飛行の可能性について考える。
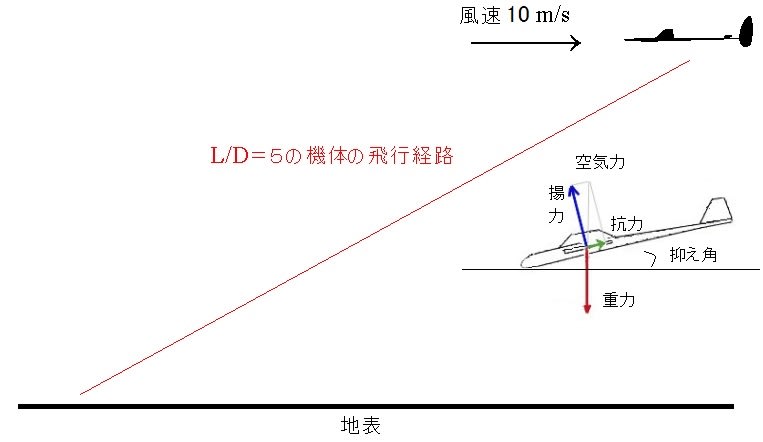
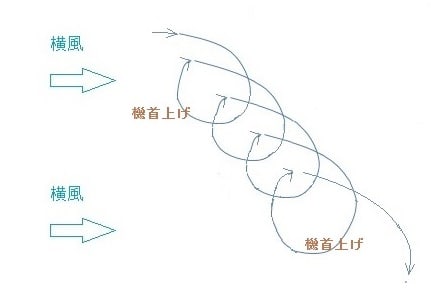
まず高度15km~20kmの成層圏において風上には滑空下降によって進み、
風下には機首上げをおこなって、揚力増加によって上昇するというサイクル飛行である。
機体重量30kgおよび50kgについてのサイクル飛行は30m/s程度の風速では
落下前の元の高度まで戻ることができないため不可能であった。
サイクル飛行が成り立つための機体条件と空気流速を近似的に検証する。
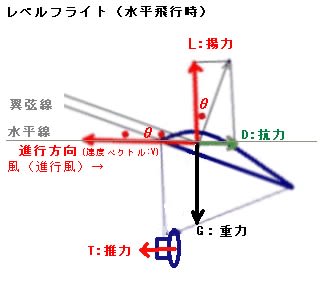
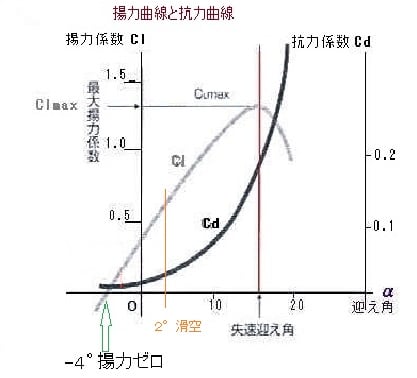
揚力係数C(L)=1.0
抗力係数C(D)=0.02
成層圏内・風速22(m/s)・翼面積20(m2)・総重量10kgでの機体について
揚力Lは
L=1/2{0.09(kg/m3)*22^2(m2/s2)*20(m2)*1.0}=435(N : kg.m/s2)
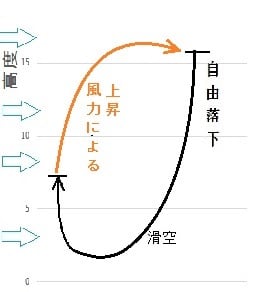
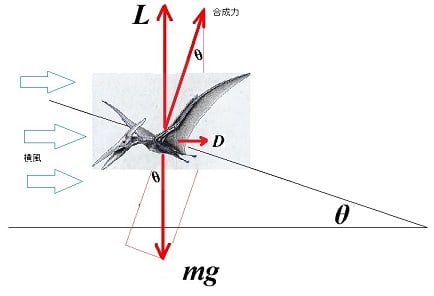
自由落下から滑空姿勢によって風上に進み、機首上げしたときに生ずるネットの揚力は、
抗力を無視できるくらい小さいとすれば上記揚力から重力を引いた上向きの成分で
435N-m・g=435-10x9.8=337N の揚力を受けて上昇する。
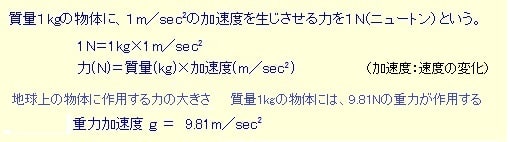
このときの運動方程式はm(dt2/d2t)=L-m・g
物体に作用する力FはF=m・a質量に加速度をかけたものだからこの時の
加速度は a=337/10=33.7(m/s2)
従って1秒後の上昇距離はy=1/2(a・t2)=16.8m となる。
次の1秒間は近似的に初速度(V0)16.8m/sでの上昇で置き換えると、
初速度からの打ち上げで計算される上昇距離は、重力方向をマイナスとして
y=-1/2(g・t2)+V0・t
から、-1/2(9.8x1)+16.8=11.9mの上昇となる。
従ってトータル16.8+11.9=28.7mの上昇である。
その後重力加速度の方が勝って、飛行体は落下する。
上昇した距離は28.7mで、近似所要時間は2秒間である。
さて、上昇揚力がなくなれば落下が始まる。そのとき機体はほぼ風速22(m/s)で
風下に流される状態となって落下している。従って横風で流される相対速度を
キャンセルするには、落下速度が最低でも22m/sとなることが必要である。
2.3秒間での落下速度は22.6m/sなので、この速度で機首を風上に向ければ
地上から見たとき、風速22(m/s)の横風での相対空気流揚力が得られたサイクル飛行が
可能となる。一方2.3秒間での自由落下距離は25.9mで上昇距離の方が大きいので、
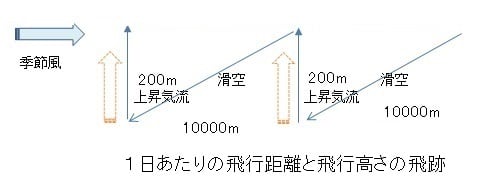
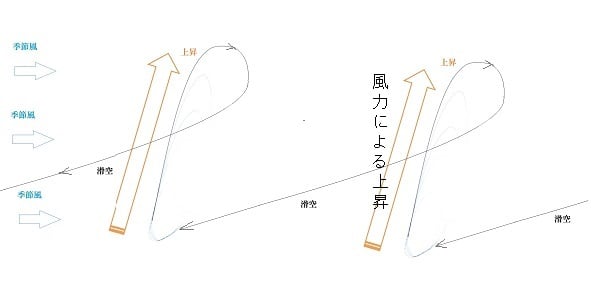
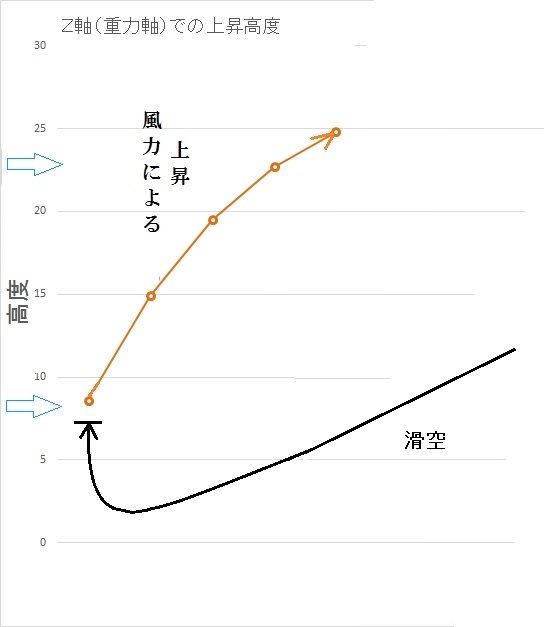
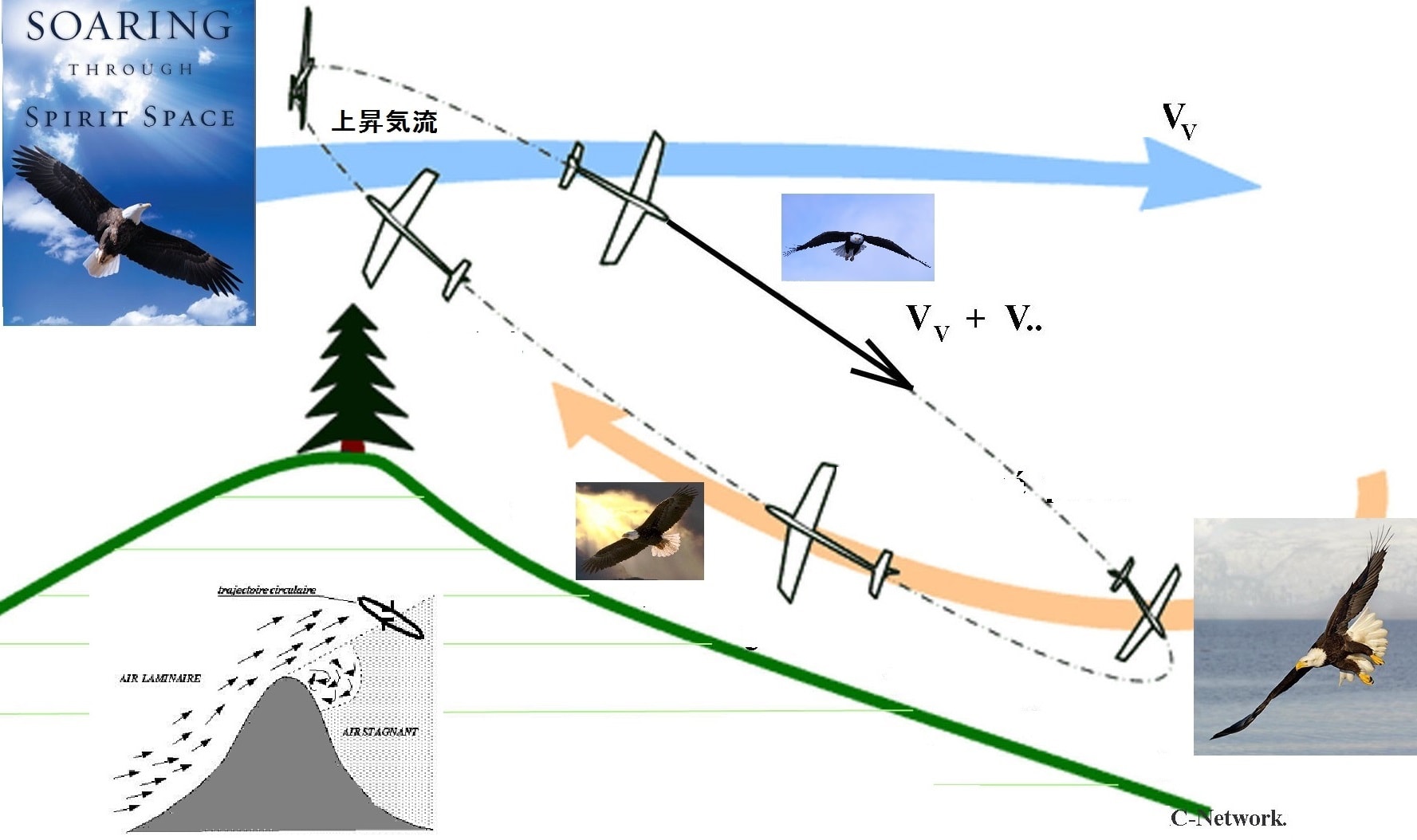
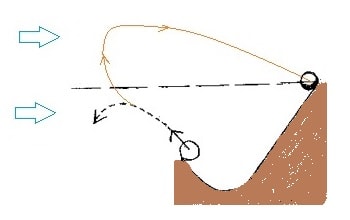
サイクル飛行を繰り返すことで、横風だけで徐々に高度を上げられる。下図
上記の状態が想定した重量ではサイクル飛行のためのミニマムであろう。
風速22(m/s)以上の横風があれば上昇距離および自由落下時間ともに拡大した
サイクル飛行が可能となる。風速および機体の抗力が大きければそれだけ風下に
流される横方向の距離が大きくなる。
従って滞空維持には何サイクルか毎での風上への滑空飛行が必要となる。

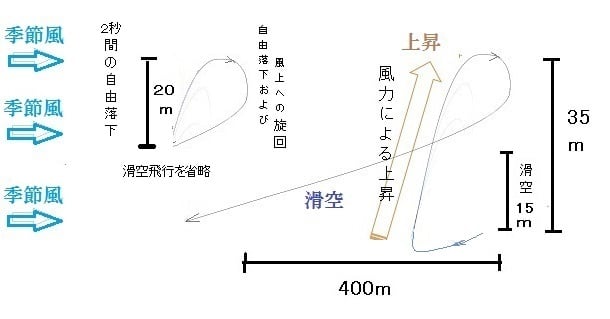
サイクル飛行の概念図
ここでの問題はやはり重量である。翼面積20(m2)・総重量10kgでの機体とするには
2mx5mの翼面積を5kgで、2枚の複葉にして強度のある構造にしなければならない。
また、抗力係数が大きい場合には、揚力による上昇時間が短くなって、上昇距離が伸びない。
また風下への移動も大きくなって、その分頻繁に風上への滑空飛行が必要となる。
従って、サイクル飛行には軽量且つ抗力係数の小さな機体設計が不可欠となる。
成層圏のように、無尽蔵に風があり、尚且つ対流圏のような無風状態や乱気流の無い空域での
周回サイクル飛行が可能である。
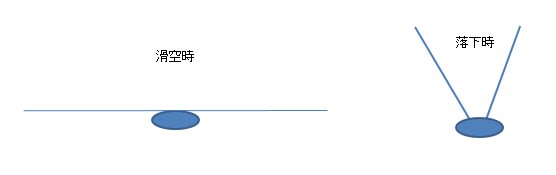
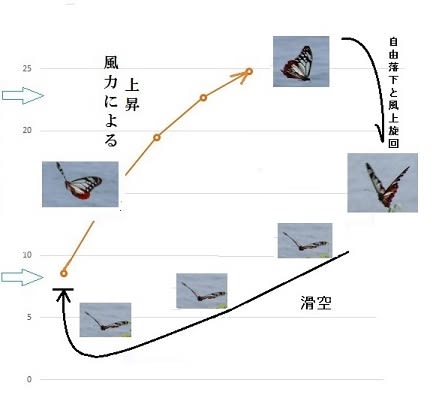
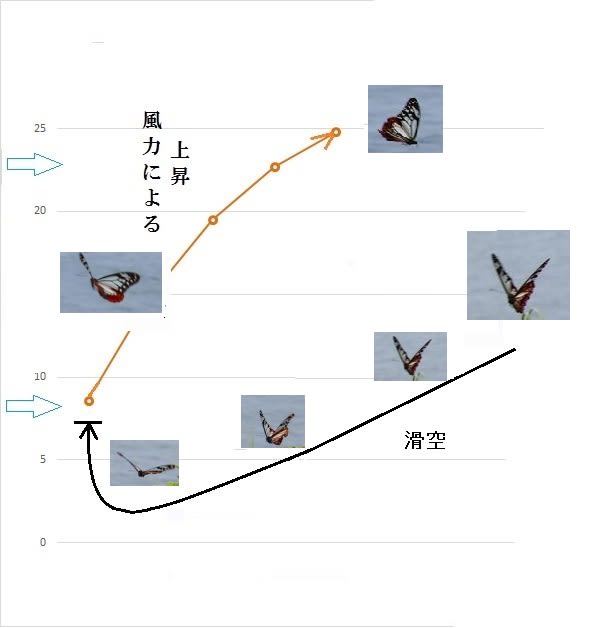
上昇気流がない場合、風力エネルギーを利用した上昇飛行であって、
風力エネルギーを効率よく利用するためには、強風でも吹き飛ばされないように、
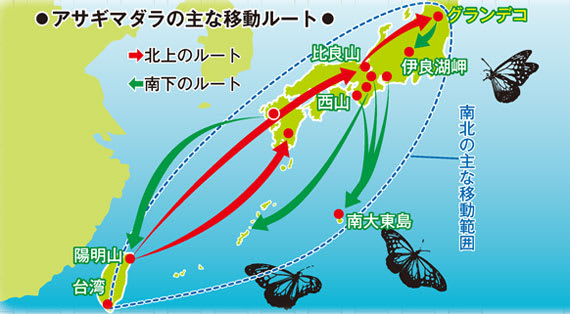
アサギマダラのように翼を立てて、自由落下に近づける。
まず高度15km~20kmの成層圏において風上には滑空下降によって進み、
風下には機首上げをおこなって、揚力増加によって上昇するというサイクル飛行である。
機体重量30kgおよび50kgについてのサイクル飛行は30m/s程度の風速では
落下前の元の高度まで戻ることができないため不可能であった。
サイクル飛行が成り立つための機体条件と空気流速を近似的に検証する。
揚力係数C(L)=1.0
抗力係数C(D)=0.02
成層圏内・風速22(m/s)・翼面積20(m2)・総重量10kgでの機体について
揚力Lは
L=1/2{0.09(kg/m3)*22^2(m2/s2)*20(m2)*1.0}=435(N : kg.m/s2)
自由落下から滑空姿勢によって風上に進み、機首上げしたときに生ずるネットの揚力は、
抗力を無視できるくらい小さいとすれば上記揚力から重力を引いた上向きの成分で
435N-m・g=435-10x9.8=337N の揚力を受けて上昇する。
このときの運動方程式はm(dt2/d2t)=L-m・g
物体に作用する力FはF=m・a質量に加速度をかけたものだからこの時の
加速度は a=337/10=33.7(m/s2)
従って1秒後の上昇距離はy=1/2(a・t2)=16.8m となる。
次の1秒間は近似的に初速度(V0)16.8m/sでの上昇で置き換えると、
初速度からの打ち上げで計算される上昇距離は、重力方向をマイナスとして
y=-1/2(g・t2)+V0・t
から、-1/2(9.8x1)+16.8=11.9mの上昇となる。
従ってトータル16.8+11.9=28.7mの上昇である。
その後重力加速度の方が勝って、飛行体は落下する。
上昇した距離は28.7mで、近似所要時間は2秒間である。
さて、上昇揚力がなくなれば落下が始まる。そのとき機体はほぼ風速22(m/s)で
風下に流される状態となって落下している。従って横風で流される相対速度を
キャンセルするには、落下速度が最低でも22m/sとなることが必要である。
2.3秒間での落下速度は22.6m/sなので、この速度で機首を風上に向ければ
地上から見たとき、風速22(m/s)の横風での相対空気流揚力が得られたサイクル飛行が
可能となる。一方2.3秒間での自由落下距離は25.9mで上昇距離の方が大きいので、
サイクル飛行を繰り返すことで、横風だけで徐々に高度を上げられる。下図
上記の状態が想定した重量ではサイクル飛行のためのミニマムであろう。
風速22(m/s)以上の横風があれば上昇距離および自由落下時間ともに拡大した
サイクル飛行が可能となる。風速および機体の抗力が大きければそれだけ風下に
流される横方向の距離が大きくなる。
従って滞空維持には何サイクルか毎での風上への滑空飛行が必要となる。
サイクル飛行の概念図
ここでの問題はやはり重量である。翼面積20(m2)・総重量10kgでの機体とするには
2mx5mの翼面積を5kgで、2枚の複葉にして強度のある構造にしなければならない。
また、抗力係数が大きい場合には、揚力による上昇時間が短くなって、上昇距離が伸びない。
また風下への移動も大きくなって、その分頻繁に風上への滑空飛行が必要となる。
従って、サイクル飛行には軽量且つ抗力係数の小さな機体設計が不可欠となる。
成層圏のように、無尽蔵に風があり、尚且つ対流圏のような無風状態や乱気流の無い空域での
周回サイクル飛行が可能である。
上昇気流がない場合、風力エネルギーを利用した上昇飛行であって、
風力エネルギーを効率よく利用するためには、強風でも吹き飛ばされないように、
アサギマダラのように翼を立てて、自由落下に近づける。