「先日坐骨神経痛の患者さんの足踏み時ZMPを計測しました。ZMPが整体前と整体後、どのように変化するか調べるためです。」
「どんな結果になった?」
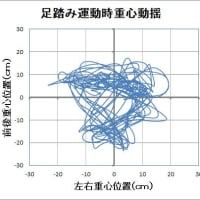
「下のリサージュ図形をご覧下さい。右が整体前、左が整体後です。」

「何だ・・・ほとんど変わってないじゃないか・・・左足と右足の着地点もズレたままだし、捩れた動作ということだな・・・」
「先輩!そこなんです。右足と左足の着地点がズレている・・・今までこれを腰の捩れた動作!として扱ってきました。」
「その考え方は間違っていたのか?」
「実はそうなんです。それが今回のお話の課題なんです。」
「どう言う事か詳しく説明してくれ!」
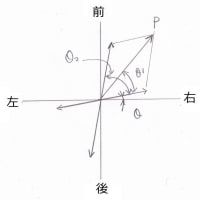
「ロボット工学で扱うZMPは、身体重心位置に発生する加速度をベクトルで考え、そこから床面重心位置に変換する便利な方法です。前後左右のZMP波形をリサージュ図形で表せば、患者さんにも分かりやすくなります。」
「確かにその通りだ・・・素人の俺にも分かりやすい・・・・」
「先日このZMPをもう一度考え直し、運動方程式をたててみました。つまりZMPの変化は加速度に影響しているということです。」
「つまり身体から発生する加速度が大きければ、ZMPは大きくなる・・・・当たり前だ!そんなの今更・・・・」
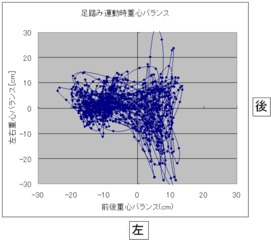
「そこで間違いが見つかったんです。リサージュ図形において右足着地点が前、左足着地点が後ろとなっていると、いかにも腰を捻った動作に見えてしまいます。しかしこれは実際左右の加速度の違いにより、発生したものなのです。」
「そうか!つまり左右の着地時に違いがある。つまり強く踏み込めば加速度は大きくなりZMPも大きくなる。左右の動作がアンバランス・・・という事になるか・・・」
「私もそう思うんです。」
「しかし今までログで随分発表してしまったな~」
「だから少しずつ訂正してゆきたいんです。私のログなんか、誰も真剣に見えてはしません。今のうちですね。」
「でっどうするんだ?」
「私自身の足踏みZMPを様々な条件で計測してみたんです。やはり思った通りの結果になりました。」
「その結果、早く見せろ!」
「少々お待ちください。」
「どんな結果になった?」
「下のリサージュ図形をご覧下さい。右が整体前、左が整体後です。」
「何だ・・・ほとんど変わってないじゃないか・・・左足と右足の着地点もズレたままだし、捩れた動作ということだな・・・」
「先輩!そこなんです。右足と左足の着地点がズレている・・・今までこれを腰の捩れた動作!として扱ってきました。」
「その考え方は間違っていたのか?」
「実はそうなんです。それが今回のお話の課題なんです。」
「どう言う事か詳しく説明してくれ!」
「ロボット工学で扱うZMPは、身体重心位置に発生する加速度をベクトルで考え、そこから床面重心位置に変換する便利な方法です。前後左右のZMP波形をリサージュ図形で表せば、患者さんにも分かりやすくなります。」
「確かにその通りだ・・・素人の俺にも分かりやすい・・・・」
「先日このZMPをもう一度考え直し、運動方程式をたててみました。つまりZMPの変化は加速度に影響しているということです。」
「つまり身体から発生する加速度が大きければ、ZMPは大きくなる・・・・当たり前だ!そんなの今更・・・・」
「そこで間違いが見つかったんです。リサージュ図形において右足着地点が前、左足着地点が後ろとなっていると、いかにも腰を捻った動作に見えてしまいます。しかしこれは実際左右の加速度の違いにより、発生したものなのです。」
「そうか!つまり左右の着地時に違いがある。つまり強く踏み込めば加速度は大きくなりZMPも大きくなる。左右の動作がアンバランス・・・という事になるか・・・」
「私もそう思うんです。」
「しかし今までログで随分発表してしまったな~」
「だから少しずつ訂正してゆきたいんです。私のログなんか、誰も真剣に見えてはしません。今のうちですね。」
「でっどうするんだ?」
「私自身の足踏みZMPを様々な条件で計測してみたんです。やはり思った通りの結果になりました。」
「その結果、早く見せろ!」
「少々お待ちください。」