先日日本技術士会で「バイオメトリクス」の講習会があり、受講してきました。
やり方によってはロボット工学にも応用できるのではないかと考えました。
「久々に日本技術士会でバイオメトリクスの講習を受けてきました。感想としてロボット工学にも応用できるのでは?と考えています。」
「どの点が応用できそうかな?」
「そうですね。今最も一般的に行われている、指紋の照合ですね。」
「警察でも使用されているな。お前は大丈夫か?」
「もちろんです。今回はこの技術をどのようにロボット工学に応用するか?お話したいと思います。」
「お前の話は間違いが多いが、一応聞いてみよう。」
「まず指紋を隆線という形でとらえ、これに細線化画像処理を実施します。すると指紋が線でとらえられ、これを個人認識に使用しようというものです。」
「これをどのようにロボット工学に応用するんだ。」
「私の治療院で行っている、姿勢解析の方法をご覧ください。」

「一見姿勢が良さそうにみえます。しかしこれをバイオメトリクスのように、細線化画像処理してみます。」

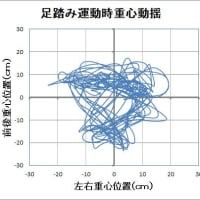
「すると姿勢の曲がりが、線によって表現されます。目に見えない曲がりが確認できると言う事です。そしてさらに重力基準線と比較してみます。」

「するとやや右に重心が偏っている事が分かります。」
「ちょっとバラツキが大きそうだが、身体の歪が分かりやすくなったな。」
「そうなんです。バラツキは確かに大きいですが、患者さんにも分かりやすく、評判もいいです。」
「どんどんやってほしいな。」
「いいえ・・・結構大変な作業なんです。体が持つか心配ですね。」
「ところでこれがロボット工学とどういう関係があるんだ?」
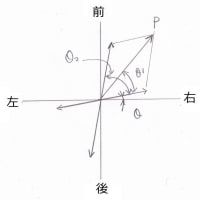
「身体の歪を画像処理工学で分析し、各関節の座要点を求めます。そして身体を頭部、胴体、下肢と3つに分けたシリアルリンクマニュプレーターに置き換えようと思ったのです。」
「ほ~ロボット工学で使用されている「ヤコビ行列」これを応用しようと思ったんだな。」
「そうです。その通りです。」
「どこまで進んでいるんだ。」
「全然進んでいません。今の治療院の技術ではとても出来る状態ではありません。」
「な~んだ・・・ようは全く進歩がない、と言う事か・・・」
「そんないい方しなくてもいいじゃないですか・・・いつか絶対実現しますよ。」
やり方によってはロボット工学にも応用できるのではないかと考えました。
「久々に日本技術士会でバイオメトリクスの講習を受けてきました。感想としてロボット工学にも応用できるのでは?と考えています。」
「どの点が応用できそうかな?」
「そうですね。今最も一般的に行われている、指紋の照合ですね。」
「警察でも使用されているな。お前は大丈夫か?」
「もちろんです。今回はこの技術をどのようにロボット工学に応用するか?お話したいと思います。」
「お前の話は間違いが多いが、一応聞いてみよう。」
「まず指紋を隆線という形でとらえ、これに細線化画像処理を実施します。すると指紋が線でとらえられ、これを個人認識に使用しようというものです。」
「これをどのようにロボット工学に応用するんだ。」
「私の治療院で行っている、姿勢解析の方法をご覧ください。」
「一見姿勢が良さそうにみえます。しかしこれをバイオメトリクスのように、細線化画像処理してみます。」
「すると姿勢の曲がりが、線によって表現されます。目に見えない曲がりが確認できると言う事です。そしてさらに重力基準線と比較してみます。」
「するとやや右に重心が偏っている事が分かります。」
「ちょっとバラツキが大きそうだが、身体の歪が分かりやすくなったな。」
「そうなんです。バラツキは確かに大きいですが、患者さんにも分かりやすく、評判もいいです。」
「どんどんやってほしいな。」
「いいえ・・・結構大変な作業なんです。体が持つか心配ですね。」
「ところでこれがロボット工学とどういう関係があるんだ?」
「身体の歪を画像処理工学で分析し、各関節の座要点を求めます。そして身体を頭部、胴体、下肢と3つに分けたシリアルリンクマニュプレーターに置き換えようと思ったのです。」
「ほ~ロボット工学で使用されている「ヤコビ行列」これを応用しようと思ったんだな。」
「そうです。その通りです。」
「どこまで進んでいるんだ。」
「全然進んでいません。今の治療院の技術ではとても出来る状態ではありません。」
「な~んだ・・・ようは全く進歩がない、と言う事か・・・」
「そんないい方しなくてもいいじゃないですか・・・いつか絶対実現しますよ。」