「先日加速度の検査をしていたら、意外なことに気づきました。」
「えっなんだ?」
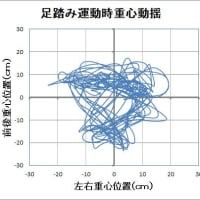
「今まで足踏み運動のZMP(ゼロモーメントポイント)は以下のようになりましたね。」
「そうだ!これは前からお前が言っていた事だよ。」
「しかし先日加速度の検査をしていたら、自分が思っていた方向と符号が逆になっていることに気づきました。」
「えっ?どういうことだ?」
「つまり加速度センサーがセンサーのプラス方向にプラス0.3Gで移動したとします。しかし表示される値はマイ
ナス0.3Gだったのです。メーカーに問い合わせたら、やはりそのように表示されるそうです。」
「そんなの常識じゃないか・・・・つまりその加速度データにわざわざマイナスをかけて、慣性力=-1×MgGと計算していたんだな?」
「まさしくその通りです。」
「お前らしいミスだ!それで修正したらどうなったんだ?」
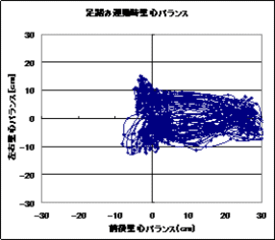
「こんな感じです。」
「ZMP波形の正反が逆になるから、こうなるのは当たり前だな。」
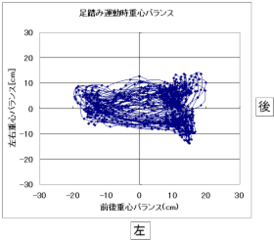
「そうなんですけど、本当にこれでいいのか迷ってしまいました。今まで後重心と思っていたのが、何となく前
になっている・・・・参考文献の歩行データではこのようになっていない・・・」
「もしかしたらこれでいいのかもしれないぞ?」
「しかし歩行の理論では・・・」
「いや~歩行と考えるのは止めた方がいい。もしかしたら足踏み運動は歩行と全く違う運動をしているのかもし
れない。」
「そうですかね?」
「よし!それでは動画画像をよ~く確認してみろ!」
・・・・・・・
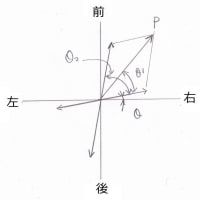
「あっ本当だ!患者さんは足を上げるとき、尻を後に突き出す・・・・」
「そうだ!歩行とは逆向き、つまり後方に加速度が発生している。だから前に重心バランスが移動しているんだ
。」
「とんでもない間違いをしていました。」
「もう一度データを整理してみよう。」
ロボット工学を応用した予防医学の研究
バイオメカニクス整体技研のホームページ
「えっなんだ?」
「今まで足踏み運動のZMP(ゼロモーメントポイント)は以下のようになりましたね。」
「そうだ!これは前からお前が言っていた事だよ。」
「しかし先日加速度の検査をしていたら、自分が思っていた方向と符号が逆になっていることに気づきました。」
「えっ?どういうことだ?」
「つまり加速度センサーがセンサーのプラス方向にプラス0.3Gで移動したとします。しかし表示される値はマイ
ナス0.3Gだったのです。メーカーに問い合わせたら、やはりそのように表示されるそうです。」
「そんなの常識じゃないか・・・・つまりその加速度データにわざわざマイナスをかけて、慣性力=-1×MgGと計算していたんだな?」
「まさしくその通りです。」
「お前らしいミスだ!それで修正したらどうなったんだ?」
「こんな感じです。」
「ZMP波形の正反が逆になるから、こうなるのは当たり前だな。」
「そうなんですけど、本当にこれでいいのか迷ってしまいました。今まで後重心と思っていたのが、何となく前
になっている・・・・参考文献の歩行データではこのようになっていない・・・」
「もしかしたらこれでいいのかもしれないぞ?」
「しかし歩行の理論では・・・」
「いや~歩行と考えるのは止めた方がいい。もしかしたら足踏み運動は歩行と全く違う運動をしているのかもし
れない。」
「そうですかね?」
「よし!それでは動画画像をよ~く確認してみろ!」
・・・・・・・
「あっ本当だ!患者さんは足を上げるとき、尻を後に突き出す・・・・」
「そうだ!歩行とは逆向き、つまり後方に加速度が発生している。だから前に重心バランスが移動しているんだ
。」
「とんでもない間違いをしていました。」
「もう一度データを整理してみよう。」
ロボット工学を応用した予防医学の研究
バイオメカニクス整体技研のホームページ