








昨日纏めた改造のポイントを再掲します。
① 手元スイッチで随時後方確認出来るようにする
② トレーラー側およびトラクター側のリアビューカメラを切り替え可能にする
③ 場合によってはトレーラー側とトラクター側のリアビューカメラシステムを分離独立させシステムの二系統化を検討する(含むトレーラー後方確認専用のディスプレーの追加)
これらを実現する上で何を新たに作り込むかの検討です。
先ず既存システムを図示すると…
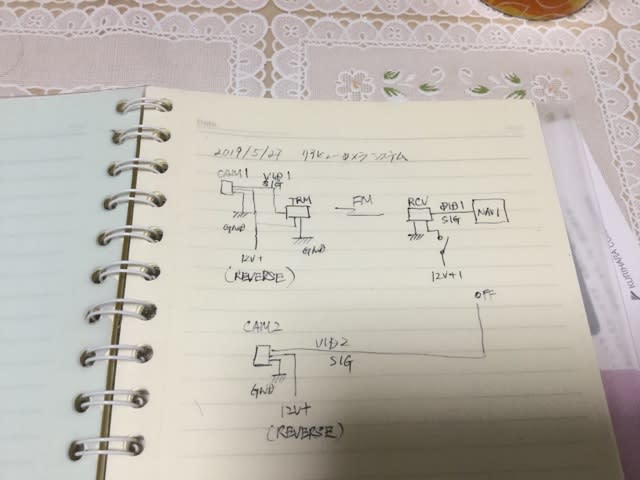
この図のCAM1はトレーラー側に設置してあるカメラで無線でトラクターに設置してあるナビに接続してあります。
一方、CAM2はトラクターに取り付けてあるリアビューカメラですが現在はナビから取り外した状態になっています。
これら二系統のビデオ信号(VID1とVID2)を切り替える方法としては、リレーを使って自動的に切り替えることを考えています。
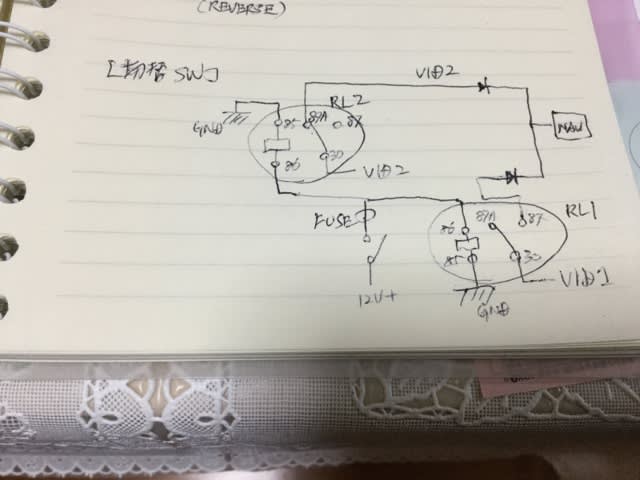
この回路を組み込むと、牽引していない時はトラクターに取り付けてあるCAM2の画像信号をナビに取り込み、トレーラーを牽引時には手元スイッチを押すとトレーラーに設置してあるCAM1の画像信号に切り替わります。
安い部品も見つけることが出来ました。

その他、代替案としては…
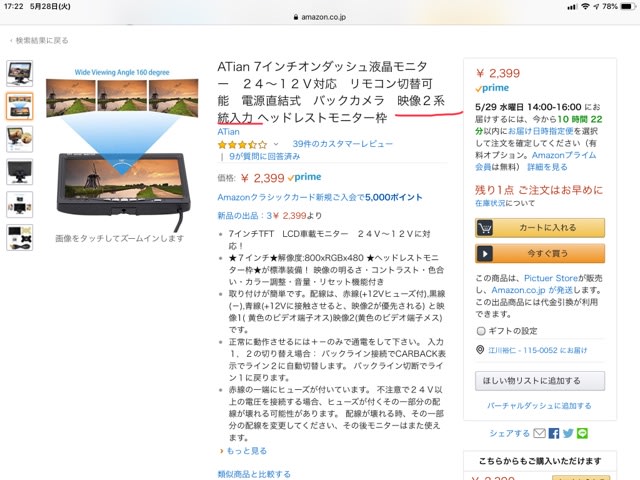
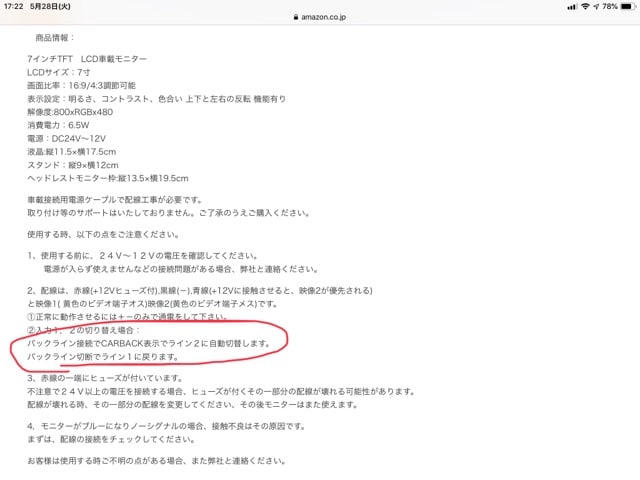
二系統の入力信号を切り替えられるディスプレーを導入することも視野に入れています。
或いは、このディスプレーを追加して、ナビとの二つの画面それぞれを二つのリアビューカメラの各々と専用として接続することもオプションの一つです。
以上で改造ポイントの②③を満たしますが、問題は①の随時後方確認が出来るようにする工夫です。
一つのアイデアとしてはトラクター側でスイッチを入れると、その電気信号がトレーラーに取り付けたカメラCAM1とトランスミッターに通電してカメラを起動させFM波で画像信号を送るようにすれば良い訳で…
例えば、現状のリバース電源が通電した際に起動させる電源回路に加えて、先述の切替スイッチを入れてスモールライトの電源スイッチを入れた時に切り替わるようにすることも可能です。
この検討の際にCAM1からの画像信号の取り込みを有線化することも含めて更なる検討を加えてみたいと思います。(但し、余り手のかかる大掛かりな改造は避けたいと思っています)
関連動画;自作トレーラーの関連動画はYouTubeにアップしてあります。宜しければご覧ください。
https://www.youtube.com/watch?v=z-eC-Jokxhw&t=25s
① 手元スイッチで随時後方確認出来るようにする
② トレーラー側およびトラクター側のリアビューカメラを切り替え可能にする
③ 場合によってはトレーラー側とトラクター側のリアビューカメラシステムを分離独立させシステムの二系統化を検討する(含むトレーラー後方確認専用のディスプレーの追加)
これらを実現する上で何を新たに作り込むかの検討です。
先ず既存システムを図示すると…
この図のCAM1はトレーラー側に設置してあるカメラで無線でトラクターに設置してあるナビに接続してあります。
一方、CAM2はトラクターに取り付けてあるリアビューカメラですが現在はナビから取り外した状態になっています。
これら二系統のビデオ信号(VID1とVID2)を切り替える方法としては、リレーを使って自動的に切り替えることを考えています。
この回路を組み込むと、牽引していない時はトラクターに取り付けてあるCAM2の画像信号をナビに取り込み、トレーラーを牽引時には手元スイッチを押すとトレーラーに設置してあるCAM1の画像信号に切り替わります。
安い部品も見つけることが出来ました。
その他、代替案としては…
二系統の入力信号を切り替えられるディスプレーを導入することも視野に入れています。
或いは、このディスプレーを追加して、ナビとの二つの画面それぞれを二つのリアビューカメラの各々と専用として接続することもオプションの一つです。
以上で改造ポイントの②③を満たしますが、問題は①の随時後方確認が出来るようにする工夫です。
一つのアイデアとしてはトラクター側でスイッチを入れると、その電気信号がトレーラーに取り付けたカメラCAM1とトランスミッターに通電してカメラを起動させFM波で画像信号を送るようにすれば良い訳で…
例えば、現状のリバース電源が通電した際に起動させる電源回路に加えて、先述の切替スイッチを入れてスモールライトの電源スイッチを入れた時に切り替わるようにすることも可能です。
この検討の際にCAM1からの画像信号の取り込みを有線化することも含めて更なる検討を加えてみたいと思います。(但し、余り手のかかる大掛かりな改造は避けたいと思っています)
関連動画;自作トレーラーの関連動画はYouTubeにアップしてあります。宜しければご覧ください。
https://www.youtube.com/watch?v=z-eC-Jokxhw&t=25s
