PIC12F1822を使って、MPLAB X MCCでI2C設定をして、I2C LCD AQM0802Aに文字を表示するテストを行いました。
まず、projectを作成してから、MCCで各種設定を行います。MCCを開いて、System Moduleの設定を行います。
INTOSC,FOSCとし、クロックは16MHzとしました。
Low Voltage programingのチェックははずし、RA3は、GPIOとしました。
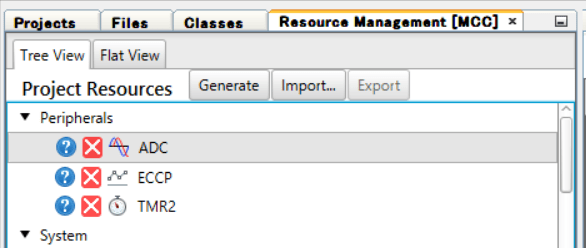
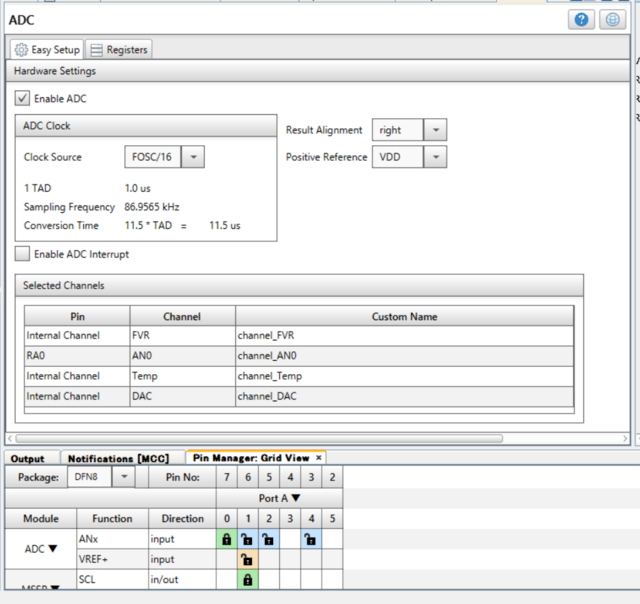
I2C通信を使うために、MSSPを導入します。
Serial ProtocolをI2Cにセットします。
Modeは、Masterにセット、クロックは100000Hz(100kHz)とし、Interrupt Drivenにチェックを入れます。(割込みを使うんですね)
割込みを使うので、Interrupt Moduleの設定を行います。
下のように、チェックを入れました。
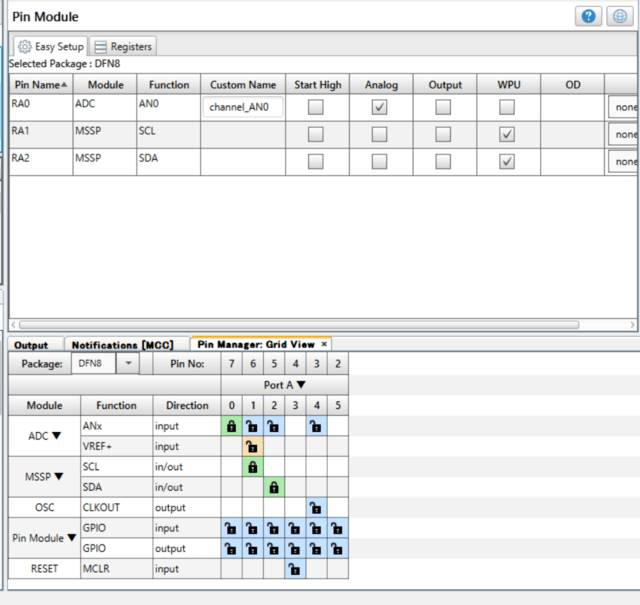
Pin Moduleには、ちゃんとRA1がSCL、RA2がSDAが設定されています。
一応ウィークプルアップ(WPU)にチェックを入れ、RegistrersでnWPUEN enableにしておきます。
Generateをクリックして、設定終了です。MCCを閉じて、プログラミングをします。各種設定ファイルとmain.cが生成されます。
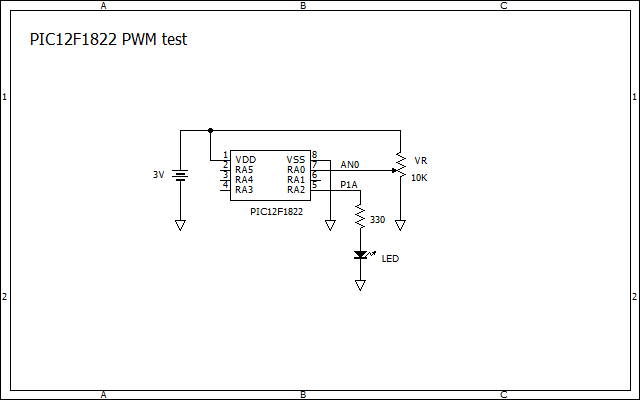
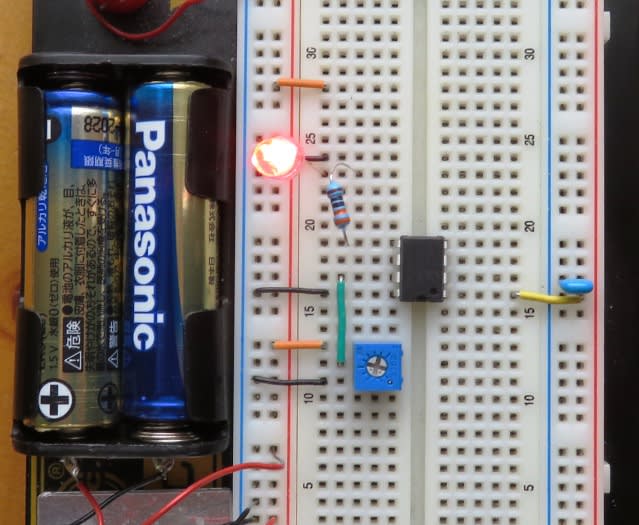
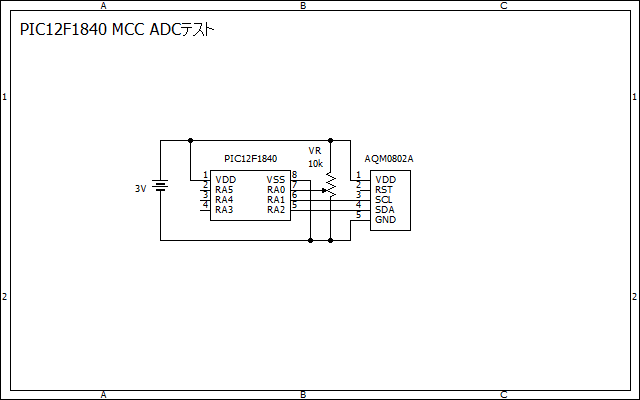
PIC12F1822とAQM0802Aモジュールの接続回路図です。電源は乾電池を使います。
MCCを使ってAQM0802Aを表示した例は、Web上では例は少なく、どのようにプログラミングするのか頭を悩ませました。そんな中、
KazHatブログというサイトの記事が参考になりました。(というか、コピーさせていただきました)
AQM0802Aをコントロールするには、I2Cスレーブアドレス(AQM0802Aの場合、0x3e)に続いて、コントロールバイト(コマンドの場合0x00、データの場合00x40)を送り、次にコマンドまたはデータを送ります。
このフォーマットを実現するためには、mcc_generated_files/examples/i2c_master_example.cの中のI2C_Write1ByteRegister(i2c_address_t address, uint8_t reg, uint8_t data)という関数を使います。
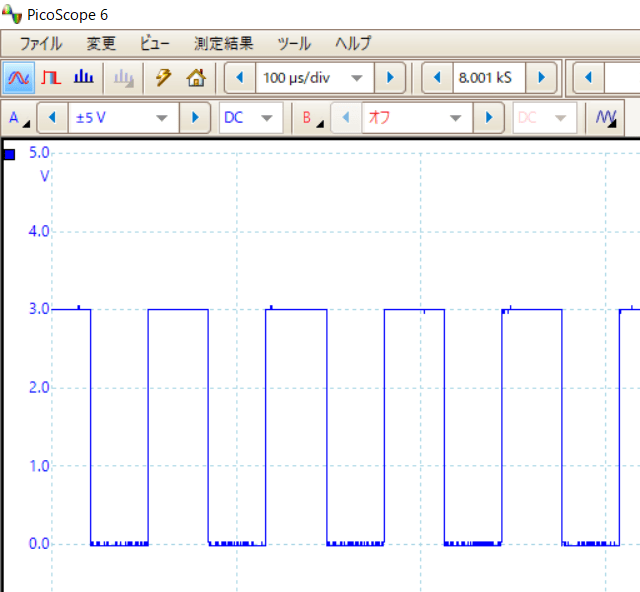
試しに、i2c_address = 0x3e,reg = 0x40,data = 0x41としてAQM0802A
送信した場合のI2C信号を見てみました。I2Cアドレスは、bit0にwriteの0が加わって、0x7cとして送信されます。OKです。
printf()関数を使っていますので、projectのpropertiesで、XC8 Global OptionsのC standerdをC90にしてコンパイルします。
-------------------------------------------------------
/*
* PIC12F1822 MCC I2C LCD AQM0802A
* 2021.05.17
* JH7UBC Keiji Hata
*/
#include "mcc_generated_files/mcc.h"
#include "mcc_generated_files/examples/i2c_master_example.h"
#define I2CLCD_AQM0802A 0x3e
//-------- send character ------------------------
void LCD_dat(char chr)
{
I2C_Write1ByteRegister(I2CLCD_AQM0802A, 0x40, chr);
__delay_us(30); // 30us
}
//-------- send command -------------------------
void LCD_cmd(char cmd)
{
I2C_Write1ByteRegister(I2CLCD_AQM0802A, 0x00, cmd);
if(cmd & 0xFC) // bit6 = 1
__delay_us(30); // 30us
else
__delay_ms(2); // 2ms Clear or Home
}
//-------- clear LCD--------------------------
void LCD_clr(void){
LCD_cmd(0x01);
}
//--------- Home -----------------------------
void LCD_home(void){
LCD_cmd(0x02);
}
//--------- Cursor X,Y -----------------------
void LCD_cursor(unsigned char x,unsigned char y){
if (y == 0)
LCD_cmd(0x80 + x);
if (y == 1)
LCD_cmd(0xc0 + x);
}
//-------- display strings -------------------------
void LCD_str(char *str){
while(*str)
LCD_dat(*str++); //pointer increment
}
//-------- write 1 character to LCD ----------------
void putch(unsigned char ch){
LCD_dat(ch);
}
//-------- LCD initialize ---------------------------
void LCD_init(){
__delay_ms(40); //40ms wait
LCD_cmd(0x38); //8bit,2line
LCD_cmd(0x39); //IS=1 : extention mode set
LCD_cmd(0x14); //Internal OSC Frequency
LCD_cmd(0x70); //Contrast set
LCD_cmd(0x56); //Power/ICON/Contrast Control
LCD_cmd(0x6C); //Follower control
__delay_ms(200);//200ms wait
LCD_cmd(0x38); //IS=0 : extention mode cancel
LCD_cmd(0x0C); //Display ON
LCD_cmd(0x01); //Clear Display
__delay_ms(2); //wait more than 1.08ms
}
void main()
{
// initialize the device
SYSTEM_Initialize();
// Enable the Global Interrupts
INTERRUPT_GlobalInterruptEnable();
// Enable the Peripheral Interrupts
INTERRUPT_PeripheralInterruptEnable();
LCD_init();
char msg[] = "Hello!";
LCD_str(msg);
unsigned char count = 0;
while (1)
{
LCD_cursor(2,1);
printf("%3d",count);
count++;
__delay_ms(1000);
}
}
-------------------------------------------------------
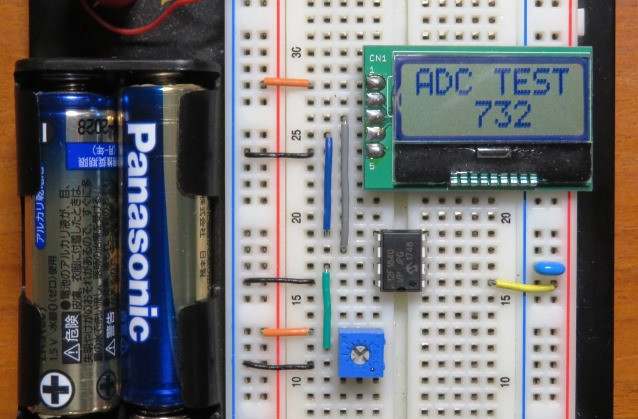
ブレッドボードと文字が表示された様子です。
一応、表示できましたが、PIC12F1822のプログラムメモリ2K Wordsのうち85%を使ってしまいました。データメモリは128byteのうち77%を使いました。
ちなみに、同等のプログラムをMCCを使わないで組んだ場合は、プログラムメモリーの37%、データメモリの27%を使いました。
つまり、MCCを使うと設定が簡略化させる分メモリーをたくさん使うということですね。メモリ容量の大きいPIC向きということでしょうか。