皆さんこんばんは、M.カトーです。
今週末も先週より更に風強めでまた、自宅待機。
昨日届いた「スキル開発キット第2弾」を広げて確認、今回のメインはこの左右の2点、
左はオシロスコープ(後で説明します)、右は「Arduino Uno R3」という小型マイコン
の互換機、2個とも同じ物ですがチップ構成がかなり違います、オリジナル(正規品)
は価格が4~5千円ですが、こちらの「パチ物」は750円~2.5千円程で買えます
因みに、この2点は何れも980円です(^^;
ただし、ArduinoIDE はオープンソースですので互換機といえども侮れません、中には
オリジナルを超える性能の「互換機」も存在します、ですが問題を抱える粗悪品も多数在り
ますのでパチ物チョイスはリスクを伴います。(で、2台購入?それでも半額以下)
所で何故にスキル開発→小型マイコン? それは私ももう還暦を過ぎて残された時間もそう
長くはなく、今更ゲートICでデジタル回路を勉強している余裕は無い(一応齧った事は有る、
ゲートICでローカルネットハブを作った事も有る)、ネット検索するとホビー制御や学習の
為に安価なマイコンが数種類あるらしくその中で最も普及(情報量が多い)している今回の
物を選択(他にほぼ市場を2分する「Raspberry Pi 」が在る)
こちらは8ビットCPUを使った「可能な限り簡単に周辺機器を使う(安価に)」マイコンで
様々なセンサーや動力(サーボモーターやステッピングモーター)を直接繋ぐ事ができる(らしい)
画像は左からシールド(拡張基盤)、LCDモジュール、サーボモーター、デュアルソナー、
サーモセンサー、赤外線センサー、等(他にも多数)これらを直接繋いでダイレクトにアクセス
できるらしい。(まだ、試してません)
プログラム開発はWindows PCで行う事が出来て開発TOOLソフト類は無料、ArduinoのHPから
必要な物をDLしてあっと言う間にプログラム作成を始める事が出来ます(1時間も掛らない)
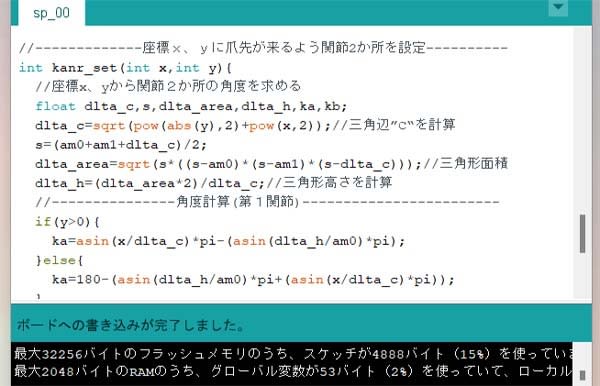
プログラムはC++が使える方なら即使える上、最初から「ひな形」が出来ていますので
「サルでも可能?」
作ったプログラムは→ボタンでUSBケーブルで繋いだUno R3に
コンパイル~転送~実行が自動で行われ、即結果が反映されます
試しにサンプルを組んで見ました。
これはフルカラーLEDをRGB信号を変化させ7色に発光させる物、追加した部品は
LED電圧を調整する抵抗だけ(それすら予めマイコン側で調整すれば不要に出来る)
そして最初に出ていた「オシロスコープ」ですが、デジタル回路のテストには「金棒」的存在
(アナログ回路にはサーキットテスター)でサンプルプログラムのR信号とG信号をモニタしてみます。
見ずらい(調整不足?)ですが、この様に信号を「見える化」出来るのがオシロスコープの存在意義。
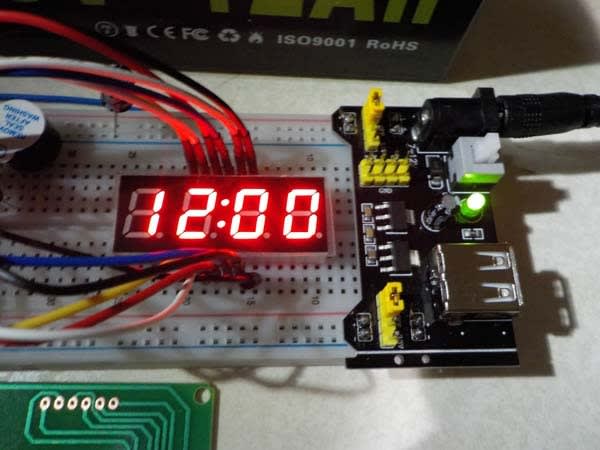
こちらは前回試したタイマーですが、表示用の4連7セグLED信号(1,2桁目のゲート信号)
をモニタした物です。
マイコンで外部機器の制御を行う場合、制御信号が「正しく出ているか?」を確認する事は
重要事項なのでオシロスコープは必須アイテムか?
次にサーボモーターの信号を調べてみます、サーボモーターは3本の電線(0v、+4.8v~6v,S)で
動きますが「S」が問題、50Hzのパルス信号と言う事ですが・・・・
モニタには3本のパルスが見えますが、横レンジ5msですからパルス間隔20ms=50Hzですね
ではどうやってこのパルスでサーボモーター(位置)を変えているのか?
ここで見やすくするため横レンジを広げてパルス波形を見やすくした上でサーボテスターの
ダイヤルを回していくと、追従してサーボも回転するのですが・・・
パルスの横幅が増えているのが確認できますね、これがサーボ制御の核心部であり
これを自前で構築(波形)出来れば自力でサーボ制御が可能に成るわけですね。
ただし、ArduinoIDEにはサーボを制御するライブラリが用意されていますので、何も考えずに
プログラムでサーボを制御する事が出来る(そうです)らしい(;;)
さて私はこの先何を作りたいのでしょうか?
それでは~