








前回からの続き
患者さんの足踏み運動時、重心(丹田)位置に発生する加速度計測を実施した私でした。
しかし
「これをどのように患者さんに分かりやすく説明するか?」
悩みました。
「加速度を測定してどうするんだぁ~」
「え~と・・・・患者さんに分かりやすくお伝えしたい。」
「だからどうやるんだよ~」
「加速度を積分して速度に・・・さらに積分して変位に変換すればいい・・・・
しかし有限の領域で積分を実施するには近似式が必要だ・・・・
しかも誤差が発生してしまう・・・・」
「お前・・・黙って聞いてればわけの分からない事言ってて・・・・何のためにロボット工学を勉強してきたんだ。」
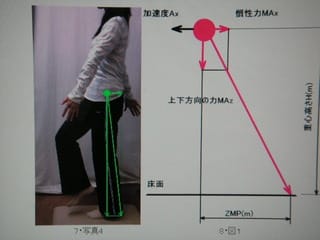
その時、ふと二足歩行ロボットの重心バランスZMP(ゼロモーメントポイント)を思い出しました。
身体の質量をM 発生加速度をA 上下発生加速度をZ、身体の重心位置高さをHメートルとすると
床面重心バランスZMP=MA*H/MZ(メートル)=A*H/Z(メートル)
となる。つまり積分を使用しないで、幾何学的に変位に返還できる。
これは便利だ!と思いました。
そして求めたZMPを時系列の波形にする。
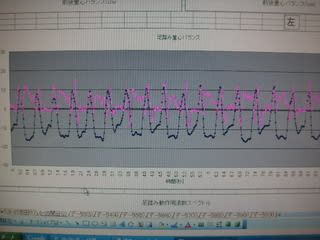
3軸だった加速度が、2軸(上下左右)の床面重心バランスZMPに変換された。
「おい!これじゃまだ加速度計測の状態と同じだぞ!これをどのように患者さんに分かりやすくするんだ?」
そうだ!問題はこれからだ!