








前回からの続き
「前回は大変失礼しました。」
「確りしてくれよ~・・でデータはそろったのか?」
「はい以下の通りです。腰痛の前後波形と、股関節痛の左右波形です。」
まずは腰痛の前後スペクトルから

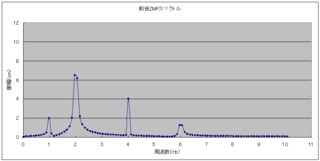
上が実際のスペクトル、下が数学モデルのスペクトルです。
次に腰痛の前後ZMP波形です。

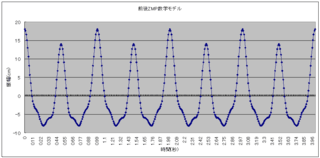
上が実際のZMP波形、下が数学モデルです。
そして股関節痛の左右スペクトル


上が実際のスペクトル、下が数学モデルです。
次に股関節痛の左右ZMP波形です。
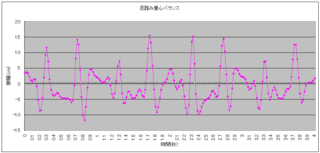

上が実際の左右ZMP波形、下が数学モデルです。
「う~ん・・・これで少しは理論的に分かりやすくなったか?」
「何とか考察してみます。」
「ちょっと大変だな・・・」
「しかし現時点で出来るだけ推定してみます。まず前後です。実際のスペクトルを参考に数学モデルを作ったところ、やはり左右に違いがあります。」
「つまり右足、左足の上げ下げに差がある、又は腰の捻れが含まれている!と考えられるな。」
「そうですね。私もそう思います。次に左右ですが、数学モデルでは遊脚時のフラツキと、衝撃が確認できます。特に7倍の周波数領域が大きく影響しているのではないかと考えられます。」
「実際の波形とスペクトル・・・・数学モデルに似ているとも、似ていないとも言えない・・・難しい問題だな。」
「そうですね。しかし数学モデルを作成することにより、患者さんのZMPがどのような特性を持っているか・・・理論的に考える事が可能になります。」
「そうか・・・それは大切な事だな。」
「これからもたくさんの研究者の方や、先生方、又は学生さんのご意見もたくさん聞いてみたいと思います。」