








はじめに
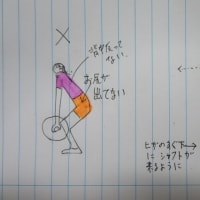
ジャンプサーブのレシーブをするために、腕と目の位置関係を一定に保って対応するということをお話してまいりました。
そのイメージを昨日の記事ジャンプサーブをレシーブする(目と腕の位置関係を一定にするイメージ)で掴んでいただいたと思います。



今日からはそのイメージを大事にしながら、実際目と腕をどのように使っていくかというお話をいたします。
サーブの軌道を読むだけでレシーブできる仕組み
目と腕の位置関係を一定に保つということは、サーブの軌道を読み切れば、それだけでレシーブができるということを意味しています。
そのイメージは次のとおりです。
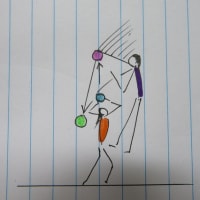
レシーバーは自分のほうに飛んで来るボールをきちっと見ることができれば、自動的に腕のレシーブ面が、ちょうどサーブのボールが飛んで来る場所に来ているという感じなのです。
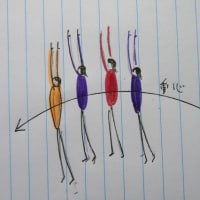
●→●→●と来るボールに目線を合わせておくことで、●のボールの軌道を読んで、そこに腕を持って行くのではなく、目線だけしっかり合わせてボールを見れば、目と腕のレシーブ面は一定の位置関係を保っているわけですから、ボールはきちっと手に当たるはずだという考え方なのです。
しかし、これだけではレシーブ面をボールの来る所に持って行くというのは難しいのです。
問題点を整理する
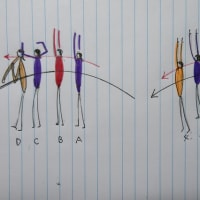
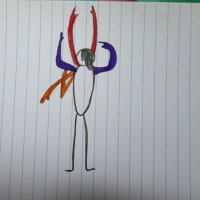
例えば、下図のように
ボールが●→●→●と来ずに●→●→○→●と飛んで来て前に落ちるという状況になったら、こういう場合どうするのかという問題が生じます。
当然、前に突っ込んでレシーブするのですが、目線を気をつけるだけで、この問題がほんとに克服できるのかということになります。
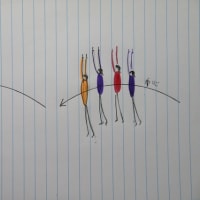
軌道の違いをどう把握するのかということなんですね。
この軌道の違いを把握するのが難しいからレシーブが難しいわけなんです。
あるいは軌道の違いを把握してもその時、どこをどう調整するとうまくレシーブできるのかという問題が残るのです。
この部分の問題を克服しないと、いくらボールを見ていても反応は遅くなってしまいます。
こうした問題についてどう考えるかについて次回お話します。
最新の画像[もっと見る]


※コメント投稿者のブログIDはブログ作成者のみに通知されます