








今日はカンカン照りではなかったですが、暑かったですねぇ~
今日は偶然!?なことに(笑)近くで子供たちの空手の試験があったので、練習中にこっそり飛行場へ行ってきました(爆
現地には自分も含めて暇なおっさんたちが集まっておりまして、皆にトリコプターを見せびらかしてしっかり物欲を上げときました~(笑
んで、今日はトリコプターの設定のお話でも・・・といいつつも、英語もわからん自分が翻訳サイトで和訳しながら設定したので、適当と言えば適当です(笑
ただ、設定値を変更した場合は実際に飛ばして挙動の変化を自分自身で確認していますんで、参考までにこれらをUPいたしますね~
まず電脳ですが、前記事のとおりCC3Dにしてあります。
基本設定の詳細は省略しますが・・・
簡単に言えば機体のタイプを「Tricopter Y」にすりゃいいです。あと、トリコプターのYではラダーサーボが必要なので、それがアナログなのかデジタルなのかを聞いてきます。
っで、上記設定画面なのですが、Roll、Pitch、YawのMIXレベルを設定するのですが、とりあえずRoll、Pitchは100に設定しましたが、Yawについてはここを上げ過ぎるとハンチングを起こします。
下げ過ぎるとテールがフラフラとなります。ようはヘリのテール感度と同じ感覚で設定すればよいのかと思います。
んで、他の設定画面なんですが、基本的にデフォルトでも普通に飛びますが、各舵の動きが緩慢なので、弄った方がよいのかと。
この設定画面は後の設定画面で関係するとこなので、重要な部分です。これはデフオルトの数値になってます。そして左上の項目に「Settings Bank1」となってますが、これを1~3まで設定できるのですが、他の画面でフライトモード1の時はどのSettings Bankを使用するかという選択があるので、ここでは違った数値のものを3つ設定した方がよいと思います。
ちなみに各舵とも数値が高いほど機体の傾きは大きくなり、グリグリと動くようになります。
ただ、一つ・・・Yawについてはサーボで機体コントロールしているのですが、初期設定画面でサーボの動作量を設定するのですが、それとこれとが独立しているものなのか(たぶん独立)どうなのか、っていうのがよくわからんですが、まぁ~大きくすればグリグリっちゅーことです(笑
これは「Settings Bank2」の画面で、数値を大きくしてみたところ。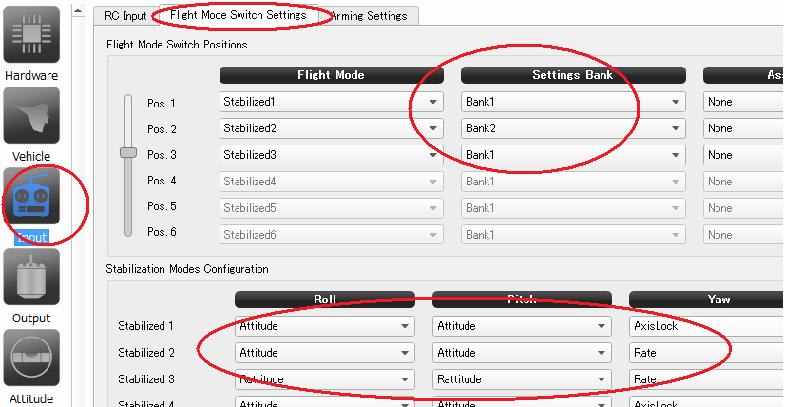
で、この画面で、たとえばフライトモード1の時(Pos1)は上記画面で設定した「Bank1」を使うとかって具合に指定します。
下段の項目は前記事でUPしたとおり、アクロ飛行ができるモードとか水平維持モードとかの設定です。
こんな具合で設定したのですが、Bankの数値を上記のように上げただけでもかなり機体の性質が変わってきます。なので、実際数値を変更して自分好みを見つけるしかないすかね。
で、今日はMobiusカメラを機体にひっ付けて高速低高度で飛ばしてみましたが・・・
画面を直視すると酔いそうです(汗
とまぁ~~~こんな感じで上手いこと飛んでくれたので、あとは少しずつ設定値変えてみてどうかってとこです。
*******************************************************
 |
Acro Afro Naze32 NAZER32 10DOF フライトコントローラ 飛行制御器 気圧計 コンパス付き【並行輸入品】 |
| クリエーター情報なし | |
| Andoer |
 |
ECSEM FPV CC3D Openpilotフライト コントローラーボード STM32 32-BIT 並行輸入品 |
| クリエーター情報なし | |
| ECSEM |
 |
TAROT CC3D OPENPILOT フライトコントローラー MINI 200/250/300 FPV KIT用飛行安定化装置 |
| クリエーター情報なし | |
| TAROT |















※コメント投稿者のブログIDはブログ作成者のみに通知されます