選択講座「二足歩行ロボット講座」最終回
今回の目標はただ一つ、「二足歩行」です
バッテリーはフル充電済
前回の授業を思い出しながら
まず、試しに前進させてみる
動作がおかしい事に気が付く…
配線を確認し、左右が逆のものがあり接続し直し
次に、モータの微調整
トライ&エラーの繰り返し…
やがて
「やったー」と大きな歓声
ようやく歩きました
その後、色々動かしていた様ですが
やがてバッテリー切れの為、終了 
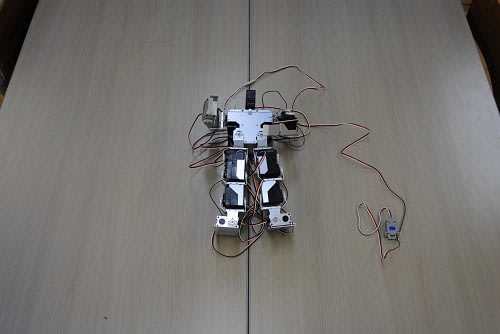
念願の二足歩行出来ました
思えば、いろいろありました・・・
「ネジ」を回す作業がほとんどの為、早く終わると思っていたら
ネジが切られていない部品をタッピングする為、時間がかかり
「ネジが入らない」と悪戦苦闘
取説に書かれているのに必要がない作業をして、2度手間になり
あっと言う間に時間が過ぎてしまったり……
サーボモーターの位置を初期位置にする為
基盤にバッテリーとサーボモータを接続したら
いきなり、煙が出たため
すぐにバッテリーをはずし、状況を確認すると
基盤と基盤を接続するケーブル1本の被覆が発熱により溶けてしまったり
さまざまなアクシデントを乗り越えて二足歩行ロボットが完成しました
まるで、人生の縮図ようでしたね
いま1.2年生がキャリア授業で
「AIと次世代のビジネス」を学んでいますが
今回の二足歩行ロボットも直接関連してくる内容なので
受講生は、更に深く考えることができるのではないでしょうか

大団円