お久しぶりのロボット講座のご報告
2足歩行が目標と説明して、スタート
「無線コントロールユニット」を見た瞬間、生徒の顔が明るく目が輝いた
彼女は以前「ロボットの操縦はロマンです」と言っていた・・・ロボ女
前回の続きから
ホームポジション設定
調整不足で安定感がないが直立はするので、サンプルモーションで2足歩行を試みる
しかし、途中から動かなくなる。原因不明…
バッテリー切れの可能性が高い為、バッテリーを充電
その間、「加速度」センサーについての説明を行う
20分程度充電したが、初期動作で停止、1分も持たなかった。痛恨のバッテリー切れ
12時間で満充電、動作可能なのは実質30分未満という燃費の悪さ
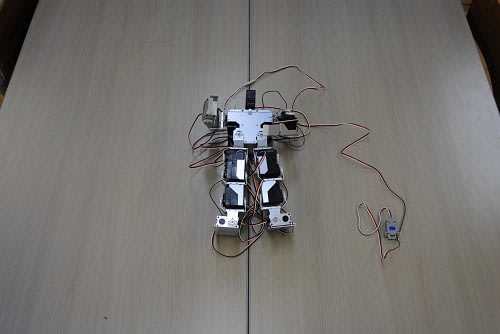
ガンプラ(1st)で例えると1/60サイズの物体が仰向けになっている
コイツ、でかいだけで何の役にも・・・
やむを得ないので、できる事を行う
腕の動きが左右逆である事が発覚した為
腕のサーボモータケーブルを接続し直しサーボケーブルを束ね
「角速度」センサーについて説明して、timeup 
生徒、曰く
「なかなか思う様にはいかない。」
「動くところがみたい」と切望する声
本当にロボットは動くのか・・・
続く
次回最終回