先日、着弾したWalkera QR-X350のテストフライトに行ってきました。
この日はやや風が強かったので心配しましたが、現地はさほど強風でもなくなんとかテストフライトができそうです。

現地で早速コンパスキャリブレーション(GPS補足)を行い、正常に完了。そして再度バインドして恐る恐る離陸です(笑
おおお~~~何のトラプルもなく離陸したぁ~~~・・・ってそうじゃなきゃ困るし・・・(爆
そしてポジションホールドからゴーホーム操作・・・・・おおおー今更ながら自分で実際やってみると感動ぉ~です!!
で・・・一つだけ試すの忘れてしまった・・・
IOC機能・・・機体の向きがどうであろうとスティック操作がそのまま移動方向になるのですが、やってみるの忘れてしまいました(汗
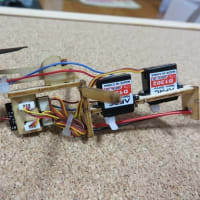
んで、実際X350にジンバル無しでROAM2を貼り付けて撮影してみました。
マラュアルモードからポジションホールド⇒ゴーホームから着陸までの動画です。
やはりジンバルが無いとペラの振動がやや入りますね、でもきになるほどじゃないか。
実はホビキンで安物ジンバルを取り寄せているのですが、あまりにも安いので先ほど確認したところモーターが付属してなかったわ・・・(滝汗
あーーーあ、久々やっちまったよ・・・
しょうがない、純正ジンバル買うかな・・・・
とりあえず、X350もPROになにってから悪評は聞かないし、これはこれでエエんじゃないかな。
**************************************





























テストフライト成功おめでとうございます(^^/
いいですね~
これは手軽に撮影できて面白いですよ!
ん~~・・・・・やばい見てると欲しくなっちゃいます~ヾ(´^ω^)ノ♪
欲しくなりました。
とりあえず何のトラブルもなく成功しました~♪
このままでも十分撮影できますが、やっぱジンバル取付けてもっと納得いく動画を撮りたいす(笑
マルチコプターの事故とか時々みかけるので、十分な知識も習得せねば!!
ポチっちゃいますか!?