









.
何が何でも軽くしたいという、つわものに送る、
飛燕に搭載した0.08g受信機の作り方を紹介します。
と言うか自分が忘れそうなので、自分の為の備忘録ですけど、
まず、PIC(10F200)にプログラムを書き込みます、田中さんの261受信機のプログラムをありがたく使わせていただきます。
私の書き込みアダプタは、上下にずれない様にプラ版片を貼り付けて手で押さえて書き込みをしています。

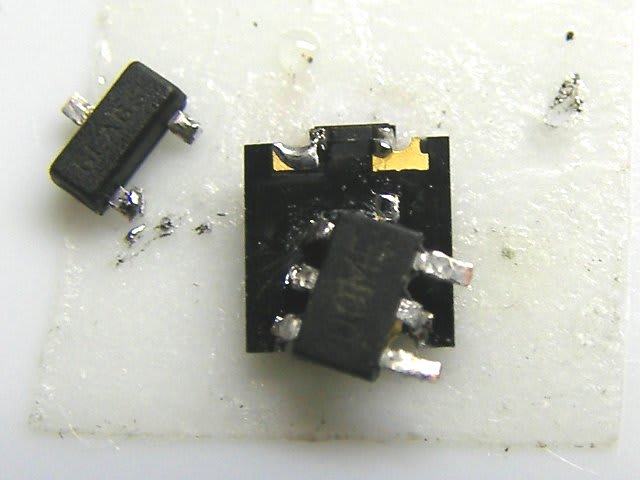
書き込めたら、ラジオペンチなどで、1番ピン(マークがある)を水平に起こし、さらに1個飛ばした3番ピンも起こしておきます。

センサをこの位置に置いて(四角い金色マークに注目)センサの左の端子にPICの6番ピン(センサ入力)と2番ピン(-)を半田付けします。

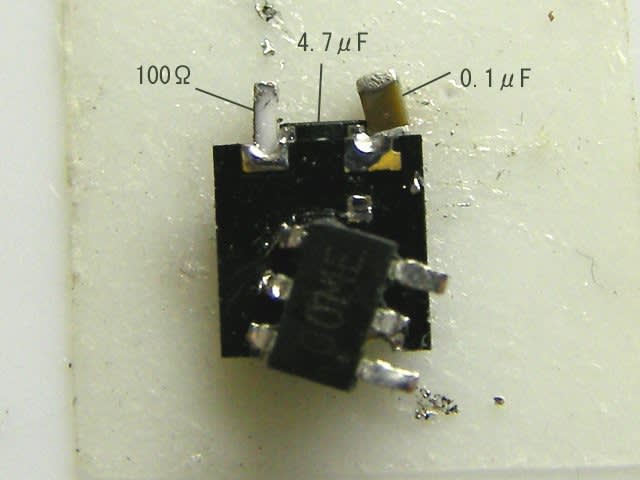
次に右側の端子(下の写真では上側)にセンサ電源の平滑用のコンデンサ、写真では4.7μF(1μ~10μF)を取り付けます。
さらにセンサ電源の100Ω抵抗と、パスコン0.1μFを取り付けます。
このあたりが少し難しいところですが、下に両面テープを貼って作業すると割りと簡単に出来ます、
次にFETを取り付けます、FETの真ん中の端子を立てておいて、
両側の端子をPICの4番ピンと、センサの四角い金マークに半田付けします。
先に金マークを半田揚げしておくと楽です。

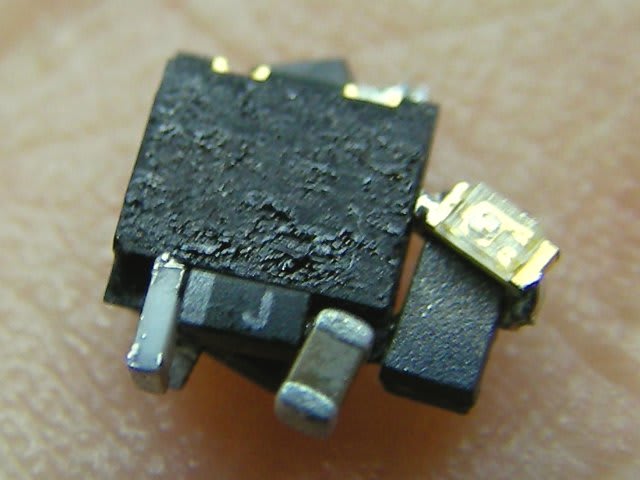
横から見るとこんな感じ、

バッテリモニタも取り付けて置きましょう、電圧監視IC(バッテリモニタIC)をこの写真のように左の端子は起こして、右の端子は裏に曲げます

そして裏側にLED(必ず青色か白色にしてください)を取り付けます、方向は上が+側、下が-です。

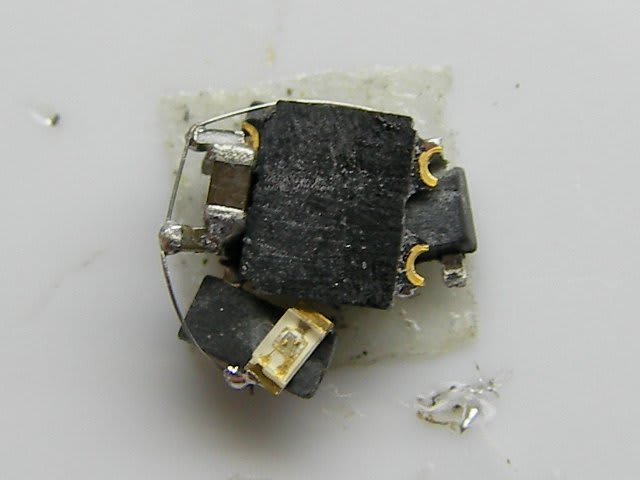
そして写真のようにバッテリモニタIC(JXM2)をセンサの右下の端子に1本だけ半田します。

横から見るとこんな感じ

裏から?(センサ受信面)から見るとこんな感じ
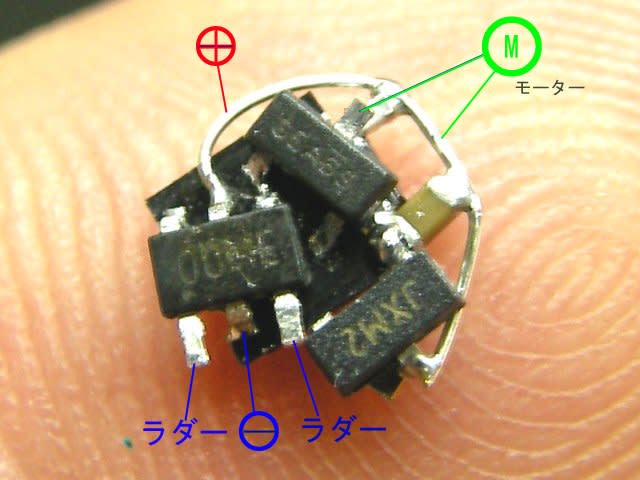
最後に+ラインをぐるりと回すと、出来上がりです。
各端子は下の通り、
パーツを削らなくてもこれくらいの重さにはできます。

10μFのコンデンサでも作ってみました、

だんだん早くできます、所要時間は15分

やっぱり少し重いですね、それでも0.1g切、

今回モーターのノイズキラーコンデンサ0.1μFは省略していますが、
経験上4ミリモーター程度なら大丈夫なようです。
ps
センサを削ったり、小さなサイズの抵抗やコンデンサに変えて、なるべく軽量化してみました。
これくらいにはなりましたが、苦労の割りに報われない感じがします。
ぜんぜん削らない方が、お得な感じ??

.
何が何でも軽くしたいという、つわものに送る、
飛燕に搭載した0.08g受信機の作り方を紹介します。
と言うか自分が忘れそうなので、自分の為の備忘録ですけど、
まず、PIC(10F200)にプログラムを書き込みます、田中さんの261受信機のプログラムをありがたく使わせていただきます。
私の書き込みアダプタは、上下にずれない様にプラ版片を貼り付けて手で押さえて書き込みをしています。
書き込めたら、ラジオペンチなどで、1番ピン(マークがある)を水平に起こし、さらに1個飛ばした3番ピンも起こしておきます。
センサをこの位置に置いて(四角い金色マークに注目)センサの左の端子にPICの6番ピン(センサ入力)と2番ピン(-)を半田付けします。
次に右側の端子(下の写真では上側)にセンサ電源の平滑用のコンデンサ、写真では4.7μF(1μ~10μF)を取り付けます。
さらにセンサ電源の100Ω抵抗と、パスコン0.1μFを取り付けます。
このあたりが少し難しいところですが、下に両面テープを貼って作業すると割りと簡単に出来ます、
次にFETを取り付けます、FETの真ん中の端子を立てておいて、
両側の端子をPICの4番ピンと、センサの四角い金マークに半田付けします。
先に金マークを半田揚げしておくと楽です。
横から見るとこんな感じ、
バッテリモニタも取り付けて置きましょう、電圧監視IC(バッテリモニタIC)をこの写真のように左の端子は起こして、右の端子は裏に曲げます
そして裏側にLED(必ず青色か白色にしてください)を取り付けます、方向は上が+側、下が-です。
そして写真のようにバッテリモニタIC(JXM2)をセンサの右下の端子に1本だけ半田します。
横から見るとこんな感じ
裏から?(センサ受信面)から見るとこんな感じ
最後に+ラインをぐるりと回すと、出来上がりです。
各端子は下の通り、
パーツを削らなくてもこれくらいの重さにはできます。
10μFのコンデンサでも作ってみました、
だんだん早くできます、所要時間は15分
やっぱり少し重いですね、それでも0.1g切、
今回モーターのノイズキラーコンデンサ0.1μFは省略していますが、
経験上4ミリモーター程度なら大丈夫なようです。
ps
センサを削ったり、小さなサイズの抵抗やコンデンサに変えて、なるべく軽量化してみました。
これくらいにはなりましたが、苦労の割りに報われない感じがします。
ぜんぜん削らない方が、お得な感じ??
.