E-SKY 004の受信機交換について、もう少し詳しく書いてみます。
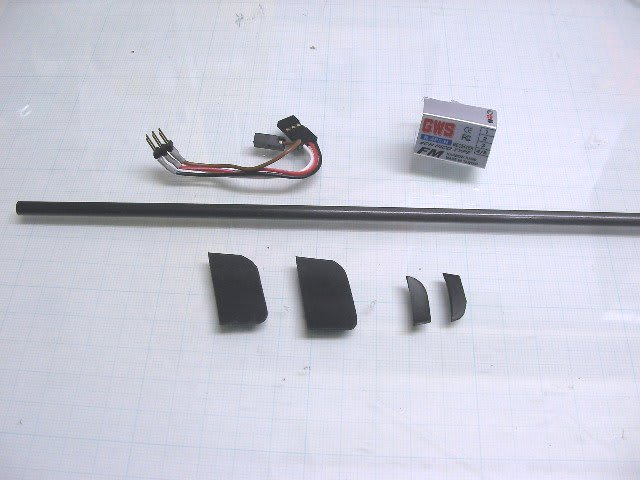
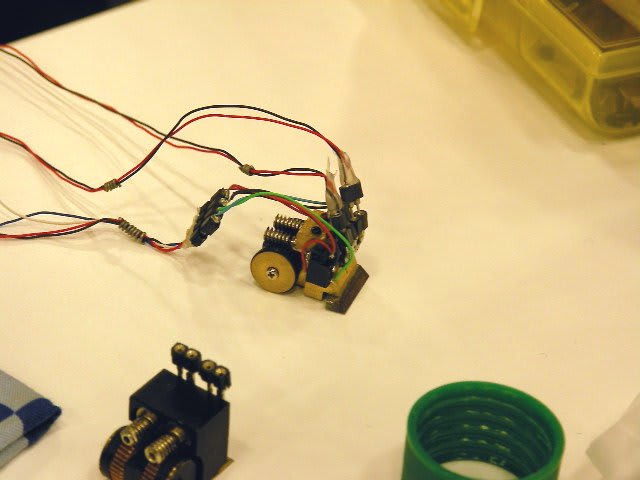
GWSの4チャンネルFM受信機は本来ピンが90度曲がって基板と平行に出ているのですが、まっすぐに立てると都合のいい事に、アンプ基板のコネクタの位置と同じ高さで、ピン配列も同じになっています、(ただし1番ピンだけ)
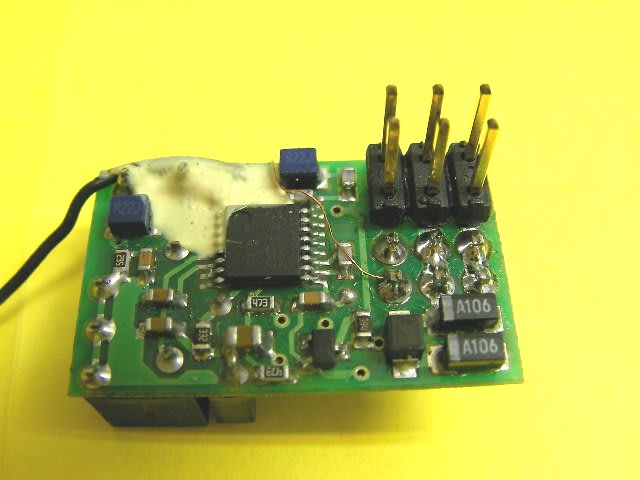
二段目のコネクタには4番目から持ってこなくてはいけません。
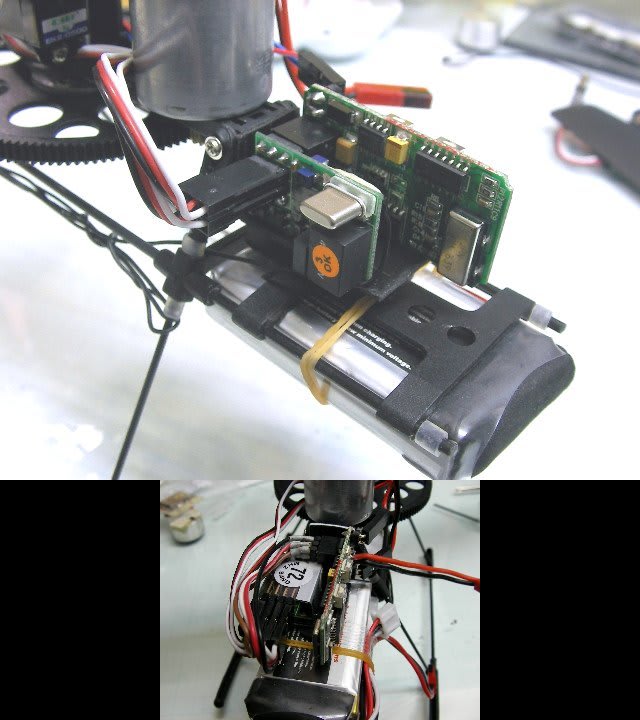
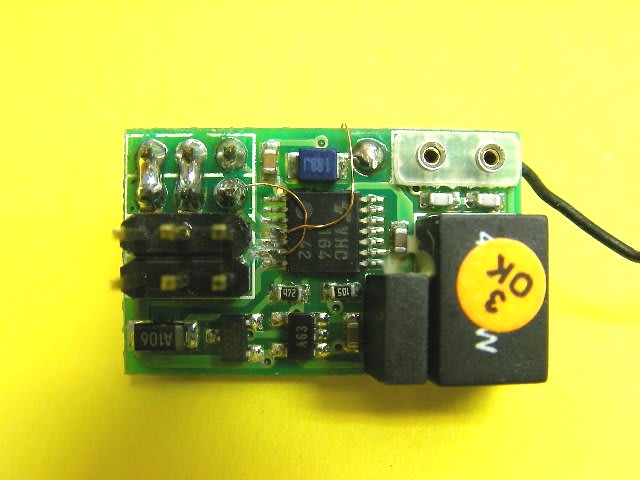
写真のように信号線だけL字に曲げて挿しています。
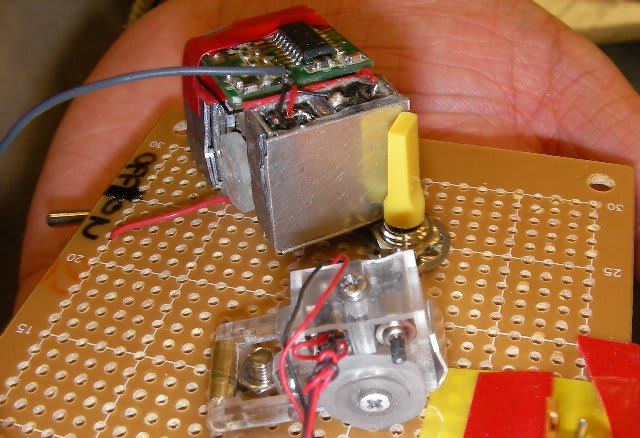
1~2段目をそのまま使って、2段目と4段目の信号を取り替えると言う方が
しっかり止まって、電源も2列確保できるので良いように思って、最初は
ワイヤーを半田してみましたが、なぜだか動かない、とっても細いICの所しか
半田できないので、ちょっと苦しいです。
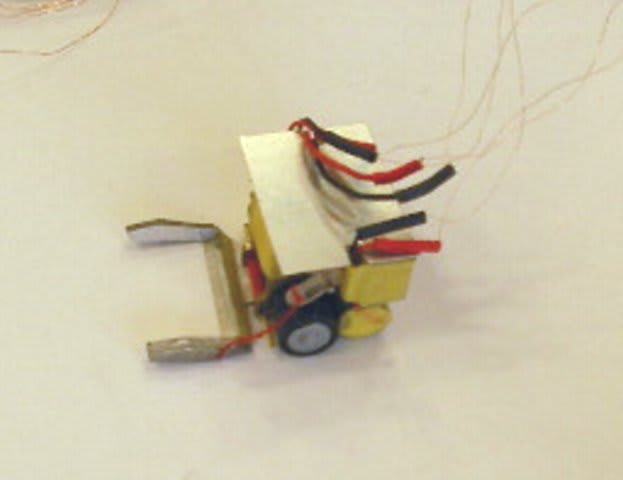
動かなかった原因はそれではなくてピンを抜く時に半田ごてで熱を掛けすぎました。ピンは曲がっている所で、ニッパーで切って出来るだけ短くして外した方が基板に負担が掛からなくて良いみたいです。
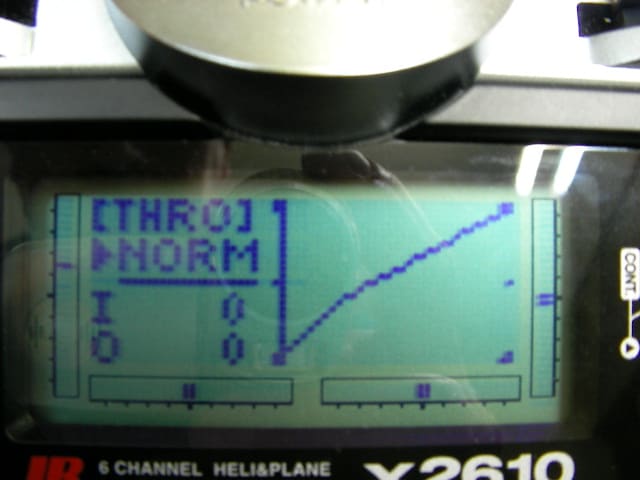
そしてこの受信機交換のもっともよい所は、スロットルカーブを適当に変化させられる所です、浮く寸前までは荒いカーブで、ホバリング領域はなだらかにすると、
操作しやすい.........と超ベテラン真鍋さんが、カーブを触ってくれました。
(私的にはどちらにしろ操縦は難しくて、違いが良くわからない、

 )
)
それから、送信機の電源も100円ショップの10個100円単三電池を使っていましたが、激安500mA3セルリポに替えたら、軽いこと軽いこと、非力な私にはぴったり、地球にもやさしくてGOOD..

そしてホバリングさせる一番の極意は........ベテランの人にお願いして、送信機を放しても、しばらくじっと止まるくらい完璧に、トリム調整してもらうことです