








日本の月着陸実証機(SLIM)のその後の動向
以下は日本の月着陸実証機(SLIM)の、その 後の動向に関する1月25日の一連のJAXAの発表です。それ以前の発表は1月18日と21日の記事をご覧ください。なお、記事は一部省略し要点を各発表の末尾に記しています。
後の動向に関する1月25日の一連のJAXAの発表です。それ以前の発表は1月18日と21日の記事をご覧ください。なお、記事は一部省略し要点を各発表の末尾に記しています。
1月25日発表1: 小型月着陸実証機(SLIM:右図)の月面着陸の結果・成果等について
宇宙航空研究開発機構(JAXA)は、2024年1月20日午前0:20(日本標準時)に小型月着陸実証機(SLIM)を月面に着陸させ、地球との通信を確立させました。
しかしながら、SLIMの着陸時の姿勢等が計画通りではなかったことから、太陽電池からの電力発生ができず、同日午前2:57(日本標準時)に地上からのコマンドにより探査機の電源をオフにしました。
 電源をオフにするまでに取得した各データの分析を行った結果、SLIMが当初の目標着地地点から東側に55m程度の位置で月面に到達していることが確認できました。また、ピンポイント着陸性能を示す障害物回避マヌーバ開始前(高度50m付近)の位置精度としては、10m程度以下、恐らく3~4m程度と評価しています。詳細データ評価は継続する必要があるものの、SLIMの主ミッションであった100m精度のピンポイント着陸の技術実証は達成できたものと考えられます。
電源をオフにするまでに取得した各データの分析を行った結果、SLIMが当初の目標着地地点から東側に55m程度の位置で月面に到達していることが確認できました。また、ピンポイント着陸性能を示す障害物回避マヌーバ開始前(高度50m付近)の位置精度としては、10m程度以下、恐らく3~4m程度と評価しています。詳細データ評価は継続する必要があるものの、SLIMの主ミッションであった100m精度のピンポイント着陸の技術実証は達成できたものと考えられます。
探査機からは、今後のピンポイント着陸技術に必要な着陸に至る航法誘導に関する技術データ、降下中及び月面での航法カメラ画像データを全て取得できました。また、接地直前には小型プローブ(LEV-1・LEV-2)の放出を成功裏に実施しました。加えて、SLIMに搭載されたマルチバンド分光カメラ(MBC)についても、電源オフまでの間に試験的に動作し、撮像画像を取得できました。
他方、太陽電池が電力を発生しない姿勢で月面上に静定した経緯について、取得した技術データを分析したところ、高度50m時点で障害物回避マヌーバを開始する直前、2基搭載されているメインエンジンの1基の推力が失われた可能性が高いことが判明しました。その状況下でSLIM搭載ソフトウェアは自律的に異常を判断し、徐々に東側に移動するSLIMの水平位置がなるべくずれないように制御しながら、もう1基のエンジンでの降下を継続しました。接地時の降下速度は1.4m/s程度と仕様範囲内より低速でありましたが、横方向の速度や姿勢などの接地条件が仕様範囲を超えていたため、結果として計画と異なる姿勢に落ち着くことになったと考えております。メインエンジンの機能喪失原因については、メインエンジン自体ではない何らかの外的要因がメインエンジンに波及した可能性が高いと考えています。本事象の原因については現在も調査中であり、詳細判明した時点で、改めてご報告いたします。
今後については、取得できた技術・科学的データの更なる分析や、異常が発生した原因の調査を進めます。同時に、現在SLIMの太陽電池は西を向いていると分析されることから、今後月面で太陽光が西から当たるようになれば、発電の可能性があると考えています。SLIMの月面上での活動はもともと数日程度以上と想定していましたが、更なる技術・科学データの取得を目指し、引き続き復旧へ向けて必要な準備を行ってまいります。
小型月着陸実証機(SLIM)は計画通り予定地点にピンポイント着陸できたものと見られるが、太陽電池の発電が確認できないことから、得られたデータのダウンロードを急いでいる。
1月25日発表2: 小型月着陸実証機(SLIM)搭載 超小型月面探査ローバ(LEV-1)月面着陸の結果・成果等について
国立研究開発法人宇宙航空研究開発機構(JAXA)は、2024年1月20日、月面に着陸間際の小型月着陸実証機(SLIM)から超小型月面探査ローバ(LEV-1)が月面に展開され、取得したテレメトリデータの分析により、月面での活動が行われたことを確認しました。 テレメトリデータによると、LEV-1はSLIMから月面に展開されたあと、計画していた跳躍移動や地上局との直接通信(変形型月面ロボット(LEV-2)データ送信含む試験電波データ伝送)を行いました。他方、月面での画像の取得は現時点、確認できておりません。 現在、LEV-1は、計画通りの月面での活動期間を終え、所定の電力を使い切り、月面で待機中の状態です。太陽方向の変化に伴う、太陽電池による発電により活動を再開する可能性があるため、引き続きLEV-1からの電波を受信する体制を維持する予定です。 今般、LEV-1はLEV-2共に日本初の月面探査ロボットとなりました。また、月面から質量2.1kg(うち通信機は90g)の超小型の月面探査ローバにより地球への直接通信に成功しました。地球から約38万キロ彼方からデータを直接送信した事例としては世界最小・最軽量と考えられます。加えて、ローバの月面での跳躍移動、LEV-2との月面ロボット間通信、移動含む完全自律機能を実現したことは、世界初の快挙であると共に、今後の月面探査ミッションに有用な技術実証が達成できたと考えており、将来のミッションに活用してまいります。さらに、アウトリーチとして行ったLEV-1からのUHF帯電波の送信は、国内外の多くのアマチュア無線家のミッション参加を促し、続々と受信の報を頂いており、月面探査において一般の方々に直接の参加の機会を設けることができました。LEV-1に関わったすべての方々に、深甚の謝意を表します。
着陸前に小型月着陸実証機(SLIM)から放出された超小型月面探査ローバ(LEV-1)からの月面からのデータが確認され、月面での活動が確認された。
1月25日発表3: 小型月着陸実証機(SLIM)搭載マルチバンド分光カメラ(MBC)による撮影画像の公開について
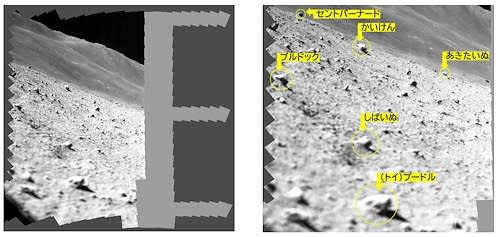 宇宙航空研究開発機構(JAXA)、会津大学および立命館大学は、小型月着陸実証機(SLIM)に搭載したマルチバンド分光カメラ(MBC)による撮影画像を公開します。
宇宙航空研究開発機構(JAXA)、会津大学および立命館大学は、小型月着陸実証機(SLIM)に搭載したマルチバンド分光カメラ(MBC)による撮影画像を公開します。
図は SLIM 搭載マルチバンド分光カメラ(MBC)による月面スキャン撮像モザイク画像(左)とその拡大図(右)
小型月着陸実証機(SLIM)のマルチバンド分光カメラ(MBC)からの月面の写真
1月25日発表4: 変形型月面ロボットによる小型月着陸実証機(SLIM)の撮影およびデータ送信に成功
 宇宙航空研究開発機構と株式会社タカラトミー、ソニーグループ株式会社、同志社大学の4者で共同開発した変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)、愛称「SORA-Q」、以下「LEV-2」)は、小型月着陸実証機(SLIM、以下「SLIM」)の撮影に成功しました。これにより、LEV-2は超小型月面探査ローバ(Lunar Excursion Vehicle 1(LEV-1)と共に、日本初の月面探査ロボットになり、世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査を達成しました。さらに、LEV-2は世界最小・最軽量の月面探査ロボットとなりました。
宇宙航空研究開発機構と株式会社タカラトミー、ソニーグループ株式会社、同志社大学の4者で共同開発した変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)、愛称「SORA-Q」、以下「LEV-2」)は、小型月着陸実証機(SLIM、以下「SLIM」)の撮影に成功しました。これにより、LEV-2は超小型月面探査ローバ(Lunar Excursion Vehicle 1(LEV-1)と共に、日本初の月面探査ロボットになり、世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査を達成しました。さらに、LEV-2は世界最小・最軽量の月面探査ロボットとなりました。
LEV-2は、LEV-1と共にSLIMに搭載され、2024年1月20日に、LEV-1と共にSLIM着陸直前に月面へ放出されました。その後、LEV-2がSLIMおよび周辺環境を撮影し、LEV-1の通信機で地上に転送した画像を公開します。
この画像は、LEV-1を経由して地上へ転送したものであり、これによりLEV-1・LEV-2間の通信機能が正常に動作したことが確認できました。また、LEV-2が収納状態の球体から変形したことから、SLIMから放出された後に、正常に月面で展開・駆動したことも併せて確認できました。さらに、LEV-2が自律制御で、オンボードの光学カメラを使って撮影した複数枚の画像の中から、SLIMが画角内に写っている良質な画像を画像処理アルゴリズムにより選定し、送信したことも分かっています。
走行ログを含めたその他のデータについては現在も解析を行っており、今後その結果を公表予定です。
SLIM の着陸前の放出された変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)の撮ったイメージから。月面に到着した SLIM が確認できる。但し、左上トップの計画時点のイメージとは著しく異なりほぼ逆さのようにも見える。これでは計画通りの発電は難しいかも知れない。
 この日を通した出来事の記者会見模様(2時間11分)は左下のイメージのリンクから。
この日を通した出来事の記者会見模様(2時間11分)は左下のイメージのリンクから。
<原典>: 国立研究開発法人宇宙航空研究開発機構(JAXA)
★ ★ ★ ★ ★ ★ ★ ★ ★ ★ ★ ★
<ミッション別ページ> --- 今日の更新項目はありません。
各ページへのリンク(ペ-ジ欄をクリック: スマホの方は横位置でご覧ください)
| 火星探査の今 | 土・日・祝日は休載 | ||
| ハッブル宇宙望遠鏡 | 週の初めに掲載 | ||
| ジェームスウェッブ宇宙望遠鏡 | 週の初めに掲載 | ||
| アルテミス2 | 2004年有人月周回準備 | ||
| 国際宇宙ステーションは今! | 特別な出来事のみ掲載 | ||
| <参考> 宇宙科学の話題 | 発表の都度 | ||
| <参考> NASAテレビ放送予定 | 宇宙ステーションの定常業務は省略 |




