NASAのシステム、ドイツ上空で超小型小惑星が衝突すると予測
 スカウト衝突評価システムが、小惑星 2024 BX1 が地球の大気圏に衝突する場所と時期を計算し、惑星防衛能力の有用な実証を提供した。
スカウト衝突評価システムが、小惑星 2024 BX1 が地球の大気圏に衝突する場所と時期を計算し、惑星防衛能力の有用な実証を提供した。
大きさ約1メートルの小さな小惑星が、1月21日日曜日の現地時間午前1時32分(CET)にドイツ上空で無害で崩壊した。小惑星が地球の大気圏に衝突する95分前に、小惑星の発見の可能性に関するデータを監視しているNASAのスカウト衝突ハザード評価システム(Scout impact hazard assessment system)が、小惑星が何時・何処に衝突するかについて事前に警告を発した。地球に接近した小さな小惑星が、大気圏に突入して崩壊する前に宇宙空間で発見されたのは、歴史上8回目である。
小惑星の衝突は明るい火球(bolide)を生成し、それは遠くチェコ共和国からも見られ、ベルリンの西約60キロメートルの衝突地点の地面に小さな隕石を散乱させた可能性がある。この小惑星は後に 2024 BX1 と命名された。
小惑星や地球近傍天体をリアルタイム3Dで探索
NASAはあらゆるサイズの地球近傍天体(NEO)について報告しているが、NASAは、議会から、地球に衝突した場合に地上に重大な被害をもたらす可能性のある140メートル以上の NEO を検出して追跡する任務を負っている。これらの天体は、 2024 BX1 のような小さな天体よりもはるかに前から発見することができる。
このような小さな小惑星は時々地球に衝突する。地球上の生命に危険を及ぼすことはないが、スカウトの迅速な応答軌道計算や衝突警報など、NASAの惑星防衛能力の有用なデモンストレーションを提供することができる。
予測方法
小惑星 2024 BX1 は、ハンガリーのブダペスト近郊にあるコンコリ天文台のピシュケステトゥ山岳観測所で、衝突の3時間前に初めて観測された。これらの初期の観測は、小惑星センター(太陽系の小さな天体の位置測定で国際的に認められた情報センター)に報告され、他の天文学者達が追加の観測を行えるように、センターの地球近傍天体確認ページに自動的に掲載された。
カリフォルニア南のNASAのジェット推進研究所の地球近傍天体研究センター(CNEOS)が開発・運用しているスカウトは、そのページから新しいデータを自動的に取得し、天体の軌道と地球に衝突する可能性を推測した。 CNEOS は、潜在的な衝突の危険性を評価するために、全ての NEO の軌道を計算する。
27分間で三つの観測が確認ページに投稿され、スカウトは当初、衝突の可能性があり、追加の観測が緊急に必要であることを確認した。ヨーロッパ中の天文学者達が小惑星センターに新しいデータを報告するにつれて、小惑星の軌道がよく知られるようになり、地球に衝突する確率が大幅に高まった。
2024 BX1 が最初に発見されてから70分後、スカウトは地球に衝突する確率が100%であると報告し、場所と時間を絞り込み始めた。追跡が続けられ、その後の1時間で更に多くのデータが利用できるようになり、スカウトは時間と場所の推定を改善した。小惑星は世界の比較的人口の多い地域で崩壊したため、火球の多くの写真やビデオがイベントの数分後にオンラインで投稿された。
地球近傍天体(NEO)の追跡
地球に衝突するかなり前に発見され、追跡された初めての小惑星は、2008年10月にスーダン上空で大気圏に突入して分裂した 2008 TC3 だった。幅4メートルのこの小惑星は、ヌビア砂漠に何百もの小さな隕石をばら撒いた。
2023年初めには、 2023 CX1 と名付けられた別の小さな小惑星が、地球の大気圏に突入する7時間前にフランス北西上空で検出された。2024年の BX1 と同様、スカウトは衝突の場所と時間を正確に予測した。
NEO 調査が更に高度かつ高感度になるにつれて、これらの無害な物体は大気圏に突入する前に検出されることが多くなり、NASAの惑星防衛計画の実際の演習に提供されている。このような事象から収集された詳細は、将来、地球との衝突コース上にある大型で危険な物体が検出された場合の緩和戦略を知らせるのに役立っている。
<出典>: Jet Propulsion Laboratory
<ひとこと>: 大判はイメージのリンクから。
★ ★ ★ ★ ★ ★ ★ ★ ★ ★ ★ ★
<お知らせ>: JAXA の発表から
変形型月面ロボットによる小型月着陸実証機(SLIM)の撮影およびデータ送信に成功
国立研究開発法人宇宙航空研究開発機構と株式会社タカラトミー、ソニーグループ株式会社、同志社大学の4者で共同開発した変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)、愛称「SORA-Q」、以下「LEV-2」)は、小型月着陸実証機(SLIM)の撮影に成功しました。これにより、 LEV-2 は超小型月面探査ローバ(Lunar Excursion Vehicle 1(LEV-1)、以下「LEV-1」)と共に、日本初の月面探査ロボットになり、世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査を達成しました。さらに、LEV-2は世界最小・最軽量の月面探査ロボットとなりました。
 参考: LEV-2は、LEV-1と共にSLIMに搭載され、2024年1月20日に、LEV-1と共にSLIM着陸直前に月面へ放出されました。その後、LEV-2がSLIMおよび周辺環境を撮影し、LEV-1の通信機で地上に転送した画像を公開します(右図)。
参考: LEV-2は、LEV-1と共にSLIMに搭載され、2024年1月20日に、LEV-1と共にSLIM着陸直前に月面へ放出されました。その後、LEV-2がSLIMおよび周辺環境を撮影し、LEV-1の通信機で地上に転送した画像を公開します(右図)。
<ひとこと>: 大判はJAXA の発表から。
記者会見模様は こちら から。
★ ★ ★ ★ ★ ★ ★ ★ ★ ★ ★ ★
<ミッション別ページ>
各ページへのリンク(ペ-ジ欄をクリック: スマホの方は横位置でご覧ください)









 NASAの歴史に残るマーズ・ヘリコプター「インジェニュイティ」は、予想を上回り、予定より数十回多く飛行した後、火星でのミッションを終了した。ヘリコプターは直立したままで地上管制官と交信しているが、今週、地球に送られた1月18日の飛行のイメージには、着陸中にローターブレードの1枚以上が損傷を受け、もはや飛行できないことを示している。
NASAの歴史に残るマーズ・ヘリコプター「インジェニュイティ」は、予想を上回り、予定より数十回多く飛行した後、火星でのミッションを終了した。ヘリコプターは直立したままで地上管制官と交信しているが、今週、地球に送られた1月18日の飛行のイメージには、着陸中にローターブレードの1枚以上が損傷を受け、もはや飛行できないことを示している。

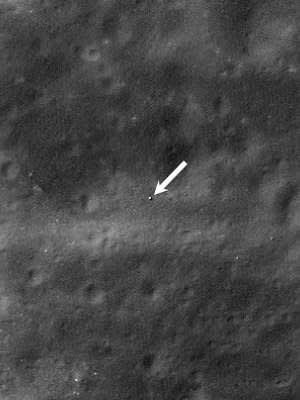 米国東部標準時2024年1月19日午前10時20分(日本時間1月20日曜日午前0時20分)、 JAXA の月探査スマート着陸船(SLIM)が月面に着陸した。その5日後、NASAの探査機「ルナー・リコネッサンス・オービター(LRO)」が着陸地点の上空を通過し SLIM を撮った。
米国東部標準時2024年1月19日午前10時20分(日本時間1月20日曜日午前0時20分)、 JAXA の月探査スマート着陸船(SLIM)が月面に着陸した。その5日後、NASAの探査機「ルナー・リコネッサンス・オービター(LRO)」が着陸地点の上空を通過し SLIM を撮った。
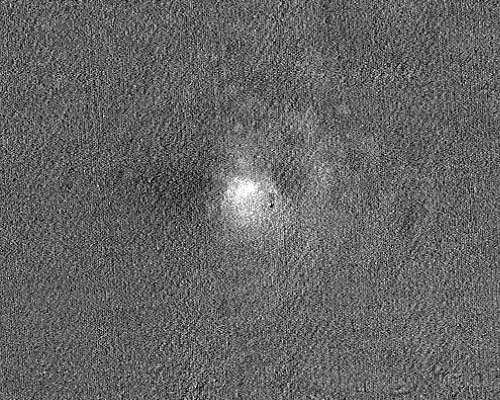 前後のイメージの合成画像。二つのイメージによってロケットの噴煙による表面の明るさの変化が強調されている。画像の幅は880メートルで、月の北は上である。
前後のイメージの合成画像。二つのイメージによってロケットの噴煙による表面の明るさの変化が強調されている。画像の幅は880メートルで、月の北は上である。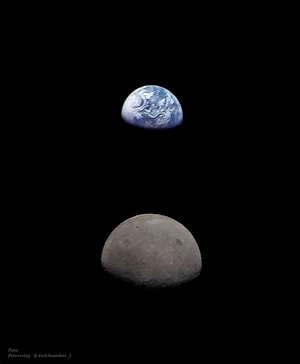 月の向こうから見ると地球や月はどのように見えるだろう? 2022年後半、NASAのアルテミスⅠミッションのロボット探査機「オリオン」が地球の最も巨大な衛星の周りを周回し、故郷の惑星を振り返り、この親しい二組を珍しい視点で捉えた。 我々の地球は月の直径の約4倍もあるので、この衛星(月)が大きく見えるのは、カプセルが小さい天体に近かったためである。NASAのアルテミスシリーズの次の打ち上げアルテミスⅡは、現在、2025年に人類を月への周回に向ける予定であり、アルテミスⅢは、2026年後半に人類を月面に帰す予定である。 先週、日本から打上げられたJAXAのロボット探査機「SLIM」が月面に着陸し、2台のホッピングローバーを解放した。
月の向こうから見ると地球や月はどのように見えるだろう? 2022年後半、NASAのアルテミスⅠミッションのロボット探査機「オリオン」が地球の最も巨大な衛星の周りを周回し、故郷の惑星を振り返り、この親しい二組を珍しい視点で捉えた。 我々の地球は月の直径の約4倍もあるので、この衛星(月)が大きく見えるのは、カプセルが小さい天体に近かったためである。NASAのアルテミスシリーズの次の打ち上げアルテミスⅡは、現在、2025年に人類を月への周回に向ける予定であり、アルテミスⅢは、2026年後半に人類を月面に帰す予定である。 先週、日本から打上げられたJAXAのロボット探査機「SLIM」が月面に着陸し、2台のホッピングローバーを解放した。 後の動向に関する1月25日の一連のJAXAの発表です。それ以前の発表は1月18日と21日の記事をご覧ください。なお、記事は一部省略し要点を各発表の末尾に記しています。
後の動向に関する1月25日の一連のJAXAの発表です。それ以前の発表は1月18日と21日の記事をご覧ください。なお、記事は一部省略し要点を各発表の末尾に記しています。 電源をオフにするまでに取得した各データの分析を行った結果、SLIMが当初の目標着地地点から東側に55m程度の位置で月面に到達していることが確認できました。また、ピンポイント着陸性能を示す障害物回避マヌーバ開始前(高度50m付近)の位置精度としては、10m程度以下、恐らく3~4m程度と評価しています。詳細データ評価は継続する必要があるものの、SLIMの主ミッションであった100m精度のピンポイント着陸の技術実証は達成できたものと考えられます。
電源をオフにするまでに取得した各データの分析を行った結果、SLIMが当初の目標着地地点から東側に55m程度の位置で月面に到達していることが確認できました。また、ピンポイント着陸性能を示す障害物回避マヌーバ開始前(高度50m付近)の位置精度としては、10m程度以下、恐らく3~4m程度と評価しています。詳細データ評価は継続する必要があるものの、SLIMの主ミッションであった100m精度のピンポイント着陸の技術実証は達成できたものと考えられます。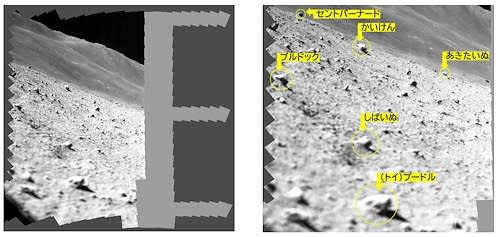 宇宙航空研究開発機構(JAXA)、会津大学および立命館大学は、小型月着陸実証機(SLIM)に搭載したマルチバンド分光カメラ(MBC)による撮影画像を公開します。
宇宙航空研究開発機構(JAXA)、会津大学および立命館大学は、小型月着陸実証機(SLIM)に搭載したマルチバンド分光カメラ(MBC)による撮影画像を公開します。 宇宙航空研究開発機構と株式会社タカラトミー、ソニーグループ株式会社、同志社大学の4者で共同開発した変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)、愛称「SORA-Q」、以下「LEV-2」)は、小型月着陸実証機(SLIM、以下「SLIM」)の撮影に成功しました。これにより、LEV-2は超小型月面探査ローバ(Lunar Excursion Vehicle 1(LEV-1)と共に、日本初の月面探査ロボットになり、世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査を達成しました。さらに、LEV-2は世界最小・最軽量の月面探査ロボットとなりました。
宇宙航空研究開発機構と株式会社タカラトミー、ソニーグループ株式会社、同志社大学の4者で共同開発した変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)、愛称「SORA-Q」、以下「LEV-2」)は、小型月着陸実証機(SLIM、以下「SLIM」)の撮影に成功しました。これにより、LEV-2は超小型月面探査ローバ(Lunar Excursion Vehicle 1(LEV-1)と共に、日本初の月面探査ロボットになり、世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査を達成しました。さらに、LEV-2は世界最小・最軽量の月面探査ロボットとなりました。 この日を通した出来事の記者会見模様(2時間11分)は左下のイメージのリンクから。
この日を通した出来事の記者会見模様(2時間11分)は左下のイメージのリンクから。

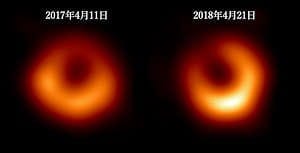 国際研究チーム「イベント・ホライズン・テレスコープ(EHT)・コラボレーション」は、史上初の撮影に成功した楕円(だえん)銀河M87の巨大ブラックホールについて新たな観測画像を公開しました。今回公開された画像は、初めての撮影が行われた2017年4月の観測から約1年後の2018年4月に観測されたものです。2018年の観測では新たにグリーンランド望遠鏡がネットワークに参加し、またデータの記録速度が向上したことで、M87ブラックホールの新たな姿が明らかとなりました。1年後の画像では、2017年に観測されたものと同じ大きさのリング構造が確認されました。この明るいリングに囲まれた中央の暗い部分が、まさに一般相対性理論で予言されている「ブラックホールシャドウ」の存在を裏付けています。一方で、リングの最も明るい場所は角度にして約30度異なっており、ブラックホール周辺の物質が乱流状に振る舞っていることを示唆しています。
国際研究チーム「イベント・ホライズン・テレスコープ(EHT)・コラボレーション」は、史上初の撮影に成功した楕円(だえん)銀河M87の巨大ブラックホールについて新たな観測画像を公開しました。今回公開された画像は、初めての撮影が行われた2017年4月の観測から約1年後の2018年4月に観測されたものです。2018年の観測では新たにグリーンランド望遠鏡がネットワークに参加し、またデータの記録速度が向上したことで、M87ブラックホールの新たな姿が明らかとなりました。1年後の画像では、2017年に観測されたものと同じ大きさのリング構造が確認されました。この明るいリングに囲まれた中央の暗い部分が、まさに一般相対性理論で予言されている「ブラックホールシャドウ」の存在を裏付けています。一方で、リングの最も明るい場所は角度にして約30度異なっており、ブラックホール周辺の物質が乱流状に振る舞っていることを示唆しています。


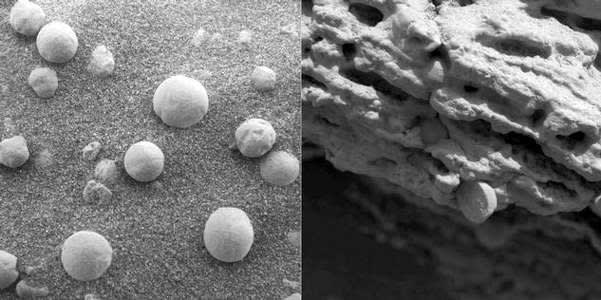 彼らの発見は、オポチュニティが上陸直後に有名な「ブルーベリー」 ---酸性の水で形成される鉱物ヘマタイトの球状の小石(左図)--- を発見するなど、科学の教科書を塗り替えることになった。
彼らの発見は、オポチュニティが上陸直後に有名な「ブルーベリー」 ---酸性の水で形成される鉱物ヘマタイトの球状の小石(左図)--- を発見するなど、科学の教科書を塗り替えることになった。
 <ひとこと>: 視聴は
<ひとこと>: 視聴は







{kind=link}