









.
ブレードMSR送信機の2.4G基板への信号の受け渡しを色々調べて来ましたが
結局のところこんな感じで良いのじゃないかと思います。
最初の立下りから10ビット毎を1バイトとして、各chについて2バイト使い
上位の6ビットがch情報で
上位2ビット+下位8ビット=10ビットでジョイスティックの位置データ
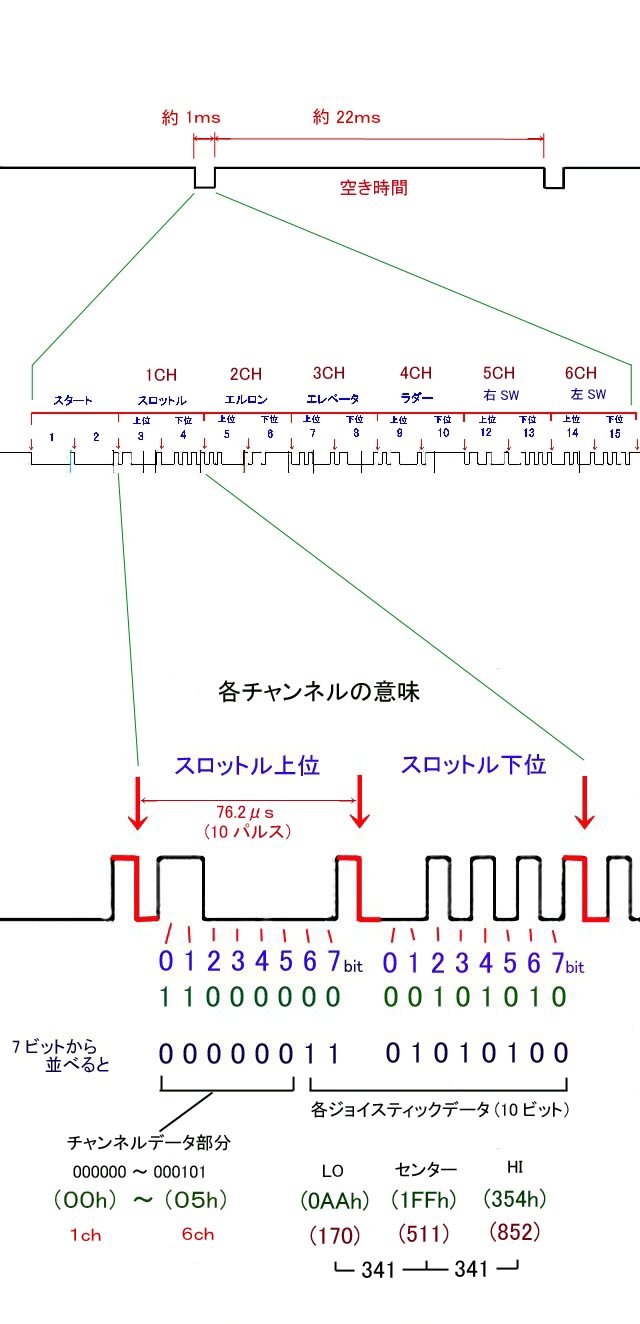
5ch、は右スティックを押すたびに0A Ahと354hを繰り返す
6chは、左スティックを押すと354h離すと0A Ah
PS ジョイスティックのデータはこれより多めに振れているときもあるようですが、
最低(170)、最高(852)で良いのではないかと想像しています。
ジョイスティックの抵抗値には結構ばらつきがありますので、
どれもきれいに中立位置で(511)になっているのはあやしくて
(そんなに精度の良いものを使っているとは思えない)
ソフト的に補正しているからではないかと想像しています
電源立ち上げ直後か、生産段階で中立位置のAD変換データーを(511)となるように補正している
のではないかと?そのばらつき分が多めに振れているのかも??
何か間違ってましたらコメントください。
ブレードMSR送信機の2.4G基板への信号の受け渡しを色々調べて来ましたが
結局のところこんな感じで良いのじゃないかと思います。
最初の立下りから10ビット毎を1バイトとして、各chについて2バイト使い
上位の6ビットがch情報で
上位2ビット+下位8ビット=10ビットでジョイスティックの位置データ
5ch、は右スティックを押すたびに0A Ahと354hを繰り返す
6chは、左スティックを押すと354h離すと0A Ah
PS ジョイスティックのデータはこれより多めに振れているときもあるようですが、
最低(170)、最高(852)で良いのではないかと想像しています。
ジョイスティックの抵抗値には結構ばらつきがありますので、
どれもきれいに中立位置で(511)になっているのはあやしくて
(そんなに精度の良いものを使っているとは思えない)
ソフト的に補正しているからではないかと想像しています
電源立ち上げ直後か、生産段階で中立位置のAD変換データーを(511)となるように補正している
のではないかと?そのばらつき分が多めに振れているのかも??
何か間違ってましたらコメントください。










取扱いヘリメーカーさんもバインド時は、トリム・ニュートラルで行う様に言われてました。
8bitで計算しても170分割なので十分ですね。
右に2コシフトして下位2ビット無視して8ビットでやりたいですよね、トリムも下位3ビット目からなので、暫定版ならそれでも良いような気もしますが
....
ちなみに私のこの間作った小型送信機は右100、左100の200段階8ビットでやってます。
10bitのデータ処理は厄介ですね。データを読み込むことが出来たので吐き出したデータで動くことを確認しようと思います。