








電子制御スロットル、アクセルペダルの踏みこみ量を電気信号でフューエルインジェクションシステムに伝達し、サーボ機構によって燃料噴射量を加減するシステムのことですが、昨今のクルマではごく当たり前に使われている機構です。ただアクセル踏みこみ量に比例して制御するのではなく、エンジン回転数や変速機のギア比などに同調して非線形制御するのが通常で、例えば素早くアクセルをオンオフしても、なだらかに噴射量を増減したり、CVT変速機のキックダウン操作などにも、アクセル開度の信号が使われています。
基本は、昔のワイヤースロットルと同様、様々な調整をしながらも、最終的にはアクセル開度に応じた燃料を噴射する機構です。
当然、機械的電気的な応答速度の遅延はあるのですが、遅延の殆どはあらかじめ設定された制御の働きそのものであり、ワイヤーのようにダイレクト制御でないからではありません。特にAT車では、全く問題なく機能しています。
※経年変化などに対応して学習機能があるものが殆どであり、そのためにややこしい調整やリセット作業が必要になったりする場合もあるのですが、それはまた別のお話。
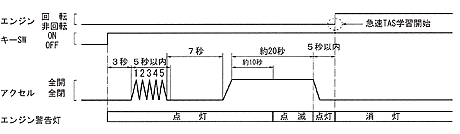
日産車のTAS学習のシーケンス、全閉学習の後に行う。
長距離連続走行において、特になだらかなアップダウンがあり、比較的カーブの少ない高速道路などでは、運転操作のすべてが、良い意味での緩慢になりがちです。また最近では長距離トラックなど含めて、クルーズコントロールを使っている場合が多いようです。
クルーズコントロールは、アクセル操作無しに、設定した速度を維持する、オートドライブ機構で、かなり歴史のある技術ですが、いまだに統一した作動順序や操作方法はありません。一方、クルコン非装着/非作動のクルマは、前述の長距離走行において、緩慢になりがちなアクセル操作のために、緩やかな勾配で運転者も意識しないまま、徐々にスピードが変化します。緩やかな上りの頂点にあるトンネルなどで、無為な渋滞が発生しやすいのはこのためです。そのような極端な例でなくとも、一般道でも例えば山間を縫うような道や、橋梁が連続する勾配の変化がある道では、当たり前に発生しています。長距離走行で、トルク(≒排気量)の大きいクルマのほうが疲れにくいのは、そのような勾配の連続による意図せぬ車速の変化に煩わされないことも、要因の一つです。
であるなら、いっそのこと、電子制御スロットルに、速度も監視させて、速度の増減に応じて燃料噴射量も制御させた方が良いのでは、という疑念を覚えます。つまり、アクセルの踏みこみ量に応じて、スピードをコントロールすると言う考えです。実際、アダプティブクルーズコントロールや、衝突防止システム、ECB(電子制御ブレーキ)、ステアリングアシストなどを通じて、トヨタやGoogleの完全自動運転の試験車輌など、自動化を目指すクルマ社会において、その制御の基本となる数字は距離と速度と時間であるわけですし、実際にハードウェアとしてのクルマが充分に進歩し、インフラストラクチャーが整備されても、そういった外側の道具と環境に対するヒトの内側の心理的抵抗、慣れというものは、さらに時間がかかることが予想されます。
実際に、速度調整スイッチとなったアクセルペダルでは、例えば急な上り坂に差し掛かったときのエンジンの回転数増加や変速機のキックダウンなど、今までにあまり経験のない動作が生じたり、アクセルオフでの慣性走行後に再びアクセルオンしたときの車速に応じたレスポンスなど、問題点もありますが、実際、都会などでは、道路上の大部分を占める電子制御スロットル車に、車速感応の制御機構を付加するのは、ハードウェア的にはごく僅かな変更、既存の機構の連携、制御ソフトの変更のみで、ほぼ事足りるはずです。トヨタのプリウスの回生ブレーキで採用されたECBは、当初、電磁ブレーキから油圧ブレーキの切換時の違和感が問題となりました。おそらくはそれと同等程度の問題は生じるでしょうが、極めて少ない投資で、来るべき自動クルマ社会でのクルマの挙動の一端に慣熟することもできます。即時的な効用としては、勾配の連続変化する道路での車間距離が、車種の混交によって、様々に変化をするのを低減することも可能かと思います。間違いなく、多様で様々な検討が加えられている事案だと思いますが、個々のクルマユーザーが、もう少し意識していてもよいと思うのです。
基本は、昔のワイヤースロットルと同様、様々な調整をしながらも、最終的にはアクセル開度に応じた燃料を噴射する機構です。
当然、機械的電気的な応答速度の遅延はあるのですが、遅延の殆どはあらかじめ設定された制御の働きそのものであり、ワイヤーのようにダイレクト制御でないからではありません。特にAT車では、全く問題なく機能しています。
※経年変化などに対応して学習機能があるものが殆どであり、そのためにややこしい調整やリセット作業が必要になったりする場合もあるのですが、それはまた別のお話。
日産車のTAS学習のシーケンス、全閉学習の後に行う。
長距離連続走行において、特になだらかなアップダウンがあり、比較的カーブの少ない高速道路などでは、運転操作のすべてが、良い意味での緩慢になりがちです。また最近では長距離トラックなど含めて、クルーズコントロールを使っている場合が多いようです。
クルーズコントロールは、アクセル操作無しに、設定した速度を維持する、オートドライブ機構で、かなり歴史のある技術ですが、いまだに統一した作動順序や操作方法はありません。一方、クルコン非装着/非作動のクルマは、前述の長距離走行において、緩慢になりがちなアクセル操作のために、緩やかな勾配で運転者も意識しないまま、徐々にスピードが変化します。緩やかな上りの頂点にあるトンネルなどで、無為な渋滞が発生しやすいのはこのためです。そのような極端な例でなくとも、一般道でも例えば山間を縫うような道や、橋梁が連続する勾配の変化がある道では、当たり前に発生しています。長距離走行で、トルク(≒排気量)の大きいクルマのほうが疲れにくいのは、そのような勾配の連続による意図せぬ車速の変化に煩わされないことも、要因の一つです。
であるなら、いっそのこと、電子制御スロットルに、速度も監視させて、速度の増減に応じて燃料噴射量も制御させた方が良いのでは、という疑念を覚えます。つまり、アクセルの踏みこみ量に応じて、スピードをコントロールすると言う考えです。実際、アダプティブクルーズコントロールや、衝突防止システム、ECB(電子制御ブレーキ)、ステアリングアシストなどを通じて、トヨタやGoogleの完全自動運転の試験車輌など、自動化を目指すクルマ社会において、その制御の基本となる数字は距離と速度と時間であるわけですし、実際にハードウェアとしてのクルマが充分に進歩し、インフラストラクチャーが整備されても、そういった外側の道具と環境に対するヒトの内側の心理的抵抗、慣れというものは、さらに時間がかかることが予想されます。
実際に、速度調整スイッチとなったアクセルペダルでは、例えば急な上り坂に差し掛かったときのエンジンの回転数増加や変速機のキックダウンなど、今までにあまり経験のない動作が生じたり、アクセルオフでの慣性走行後に再びアクセルオンしたときの車速に応じたレスポンスなど、問題点もありますが、実際、都会などでは、道路上の大部分を占める電子制御スロットル車に、車速感応の制御機構を付加するのは、ハードウェア的にはごく僅かな変更、既存の機構の連携、制御ソフトの変更のみで、ほぼ事足りるはずです。トヨタのプリウスの回生ブレーキで採用されたECBは、当初、電磁ブレーキから油圧ブレーキの切換時の違和感が問題となりました。おそらくはそれと同等程度の問題は生じるでしょうが、極めて少ない投資で、来るべき自動クルマ社会でのクルマの挙動の一端に慣熟することもできます。即時的な効用としては、勾配の連続変化する道路での車間距離が、車種の混交によって、様々に変化をするのを低減することも可能かと思います。間違いなく、多様で様々な検討が加えられている事案だと思いますが、個々のクルマユーザーが、もう少し意識していてもよいと思うのです。