








スライド前進動画。

p1450174.mp4
スライド後退動画。
p1450175.mp4
クリックして画像でたら右クリックで゛ループをチェックして再生すると永遠に繰り返す。
☆
この速度は2,200パルスをステッピングモータードライバに入力している。

回転角度はパルスの数に比例
ステッピングモーターの回転角度は、ドライバに入力するパルス信号の数(パルス数)に比例します。
ステッピングモーターの回転角度とパルス数の関係は、次のようになります。
θ = θS × A
θ
: モーター出力軸の回転角度 [°]
θS
: ステップ角度 [°/step]
A
: パルス数
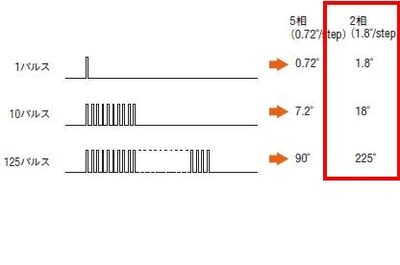
ステッピングモーターは2相なので1パルスは1.8°移動する事になる。
ハネ8枚あるので45°ピッチ、ドライバより25パルスを送るとハネは45°回転する。
よって200パルス送れば360°の1回転となる。
スライドの移動は、この25パルスから次の25パルス間に移動させる事になる。
p1450174.mp4
スライド後退動画。
p1450175.mp4
☆
この速度は2,200パルスをステッピングモータードライバに入力している。
回転角度はパルスの数に比例
ステッピングモーターの回転角度は、ドライバに入力するパルス信号の数(パルス数)に比例します。
ステッピングモーターの回転角度とパルス数の関係は、次のようになります。
θ = θS × A
θ
: モーター出力軸の回転角度 [°]
θS
: ステップ角度 [°/step]
A
: パルス数
ステッピングモーターは2相なので1パルスは1.8°移動する事になる。
ハネ8枚あるので45°ピッチ、ドライバより25パルスを送るとハネは45°回転する。
よって200パルス送れば360°の1回転となる。
スライドの移動は、この25パルスから次の25パルス間に移動させる事になる。