0.3秒!!
これは何の数字かと言うと、レース時における速いマシンとのベストラップのタイム差になります。
わずか0.3秒なのですが、アベレージではこれよりもタイム差が広がり、8分間の決勝レースではかなりの差になってしまいます。
ある意味、大きな壁です。
(;´∀`)
ケッコウデカイヨ。
ストレートのトップスピードやコーナーの旋回速度ではあまり差はありません。
しかし、差が付いている部分はハッキリしています。
腕の差が出る「ブレーキング」です。
(;´∀`)
ワッ、ワカッテルヨ。

いつものコースでは、姿勢制御を含めたブレーキを使う場所が3ヶ所あります。
・ 全開区間からの減速が必要な第2コーナー
・ アンダーステアが出やすい中速コーナーの第4コーナー
・ 曲がり方でストレートでの差が出る最終コーナー
この3ヶ所のブレーキングで大きなタイム差となっています。
今回は「自分のテクニック」では何ともなりそうもないので、プロポの設定で何とかしていきます。
(;´Д`)
オテテハゲンカイデス。

その前に、スピードコントローラーの「ドラッグブレーキ」の設定を「ゼロ」にします。
ドラッグブレーキを切っていないと、凄く弱い「姿勢制御」のブレーキが安定しません。
それではプロポの設定をしていきます。
自分のプロポはスティックプロポの「EXEZS X」なので、設定画面が古いのは勘弁して下さいね。
(;´∀`)
フルイカラナ。
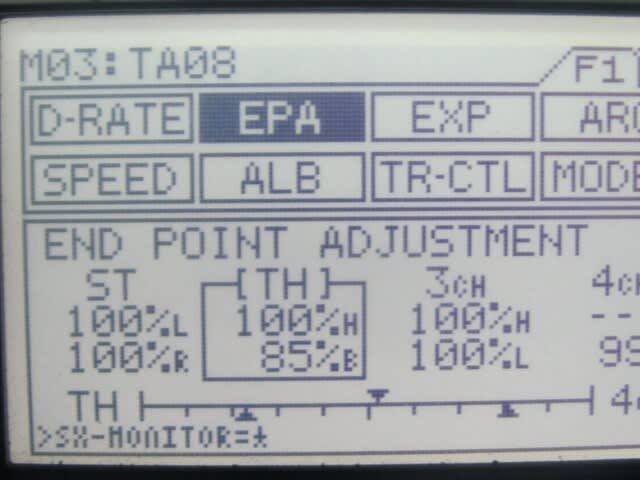
もともとEPツーリングとGPツーリングではプロポの「EPA機能」を使って、ブレーキを少し弱めて使っています。
TA08でブレーキのEPAを85パーセントで使っていました。
タミチャレクラスでは「強いブレーキ」があまり必要と思わないので、
「姿勢制御に振ったブレーキング」
に変更して、タイムアップを目指していきます。
まず最初にブレーキのEPAの値を下げていき、「ブレーキの弱くなるポイント」を探します。

自分のプロポでは「72パーセント」を境に、急にブレーキが弱くなります。
(この数値はプロポや搭載しているメカで変わってくるので注意が必要です。)
この値を基準に姿勢制御をメインとしたブレーキを調整していきます。
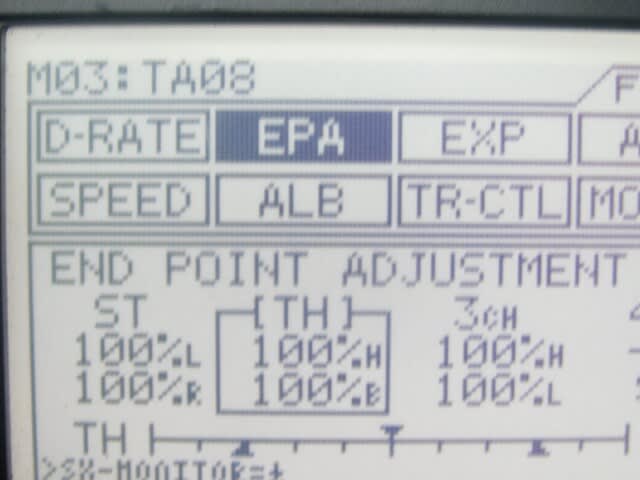

EPAの数値が100パーセントの場合は、最高速からのブレーキで約1メートル位の位置で停止します。

EPAの数値が72パーセントでは3メートル位で低速過ぎてブレーキが効かなくなり、3.5メートル位で停止します。
この位のブレーキの強さを基準に、路面に合わせて調整していきます。
次にブレーキ操作による「姿勢制御」のし易さを調整します。
ブレーキの操作量で ニュートラル → 姿勢制御(弱) → 姿勢制御(中) → ブレーキ と使い分けていきます。

EXPの数値を下げていきブレーキレバーの操作量が1/3位で姿勢制御(弱)、2/3位で姿勢制御(中)になる位に調整していきます。
自分の操作した感覚では -70パーセント位で操作の使い分けができる様になりました。

テスト走行した感じでは、かすかにモーターの減速音がする姿勢制御(弱)で中速コーナーのアンダーステアが抑えられた感じです。
また、ストレートや最終コーナーの減速でマシンが制御が安定しました。
結果、アベレージタイムが上がりました。
(*´∀`)
デキルヨウニナリマシタ。
次回、レースに参加して成果をみたいと思います。