US5536035(General Motors)
ラッパ状に広がる:
"The housing 15 includes walls 20 and 21 which generally flare outward towards a bottom opening 23 and between which is connected wall 22."
倒置:
"Formed integrally with the walls 20-22 is top 24 which includes a central opening 25, three suspension mounting openings 26-28 located around the central opening 25 and two adaptor mounting openings 30 and 31."
構成:
"The housing 15 is generally configured to provide an adequate opening to receive the suspension assembly without unduly intruding into the available space provided within the engine compartment of the vehicle."
取付:
1) "Adaptor 35 is constructed of a rigid material such as steel and includes riser 36 which has a means for mounting to suspension support 17 such as fastener openings, representative of which, is opening 37."
2) "The steering knuckle and hub assembly 58 is rotatably mounted to the control arm 61 and carries rotor 62."
3) "Control arm 61 includes mounting opening 63 for attachment to control arm mount 33 on suspension support 17 and mounting stud 64 for attachment to control arm mount 34 on suspension support 17."
4) "Control arm mount 33 is securely attached to suspension support 17 and is carried within housing 15 near wall 20."
結合:
"Strut assembly 50 is coupled to the shock tower 10 by means of fasteners 54-56."
therefor:
"Riser 36 is connected to platform 38 and provides support therefor."
(副詞か・・・)
合う:
"The portion of adaptor 35 including platform 38 and the adjacent areas of braces 46, 47 and frame 39 are shaped to closely mate with the area of housing 15 adjacent the top 24."
代表:
"The shock absorber 70 is connected directly to lower control arm 77 by a plurality of fasteners representative of which is fastener 78."
US8316972(Florida Institute for Human and Machine Cognition)
移行、推移:
"A method for transitioning a reconfigurable robot over an obstacle in its path"(他動詞)
付帯状況:
1) "a base, having a first end, a second end, and a forward facing side, with a first rear wheel and a second rear wheel being attached to said first end of said base"
2) "a second arm, having a first end and a second end, with said second end having a second front wheel"
近い、接近:
"a track system proximate said forward facing side of said base and attached to said base"
準備する、置く、する:
"providing said reconfigurable robot in a high center of mass configuration wherein said front wheel is lifted off the ground and said reconfigurable robot is balanced on said rear wheels"
において更に:
"A method for transitioning a reconfigurable robot over an obstacle in its path as recited in claim 5, further wherein said first front wheel and said second front wheel can be driven at different speeds in order to steer said reconfigurable robot."
構成、形状:
"The present invention pertains to methods for control of the configuration and motion of a robot"
where:
"Robots are particularly useful in combat situations, where they may be deployed into dangerous environments without putting soldiers' lives at risk."
cf. "FIG. 1 shows the invention in an upright two-wheeled high Center of Mass balance configuration in which a control system provides a command to main drive wheels 30, 31 in order to balance the robot on the two main drive wheels."
避けながら巧に移動:
"Unlike human soldiers, current robot platforms cannot easily maneuver around rocks, trees, and holes."
詳細に示す:
"FIG. 7 shows a flowchart detailing an algorithm for transitioning the device from a low Center of Mass configuration to a high Center of Mass balance configuration."
連続画像シーケンス:
"FIG. 9 is a time-lapsed image sequence of the embodiment of FIG. 4 transitioning from a four-wheel low Center of Mass configuration to a four-wheeled A-frame configuration to a two-wheeled high Center of Mass balance configuration."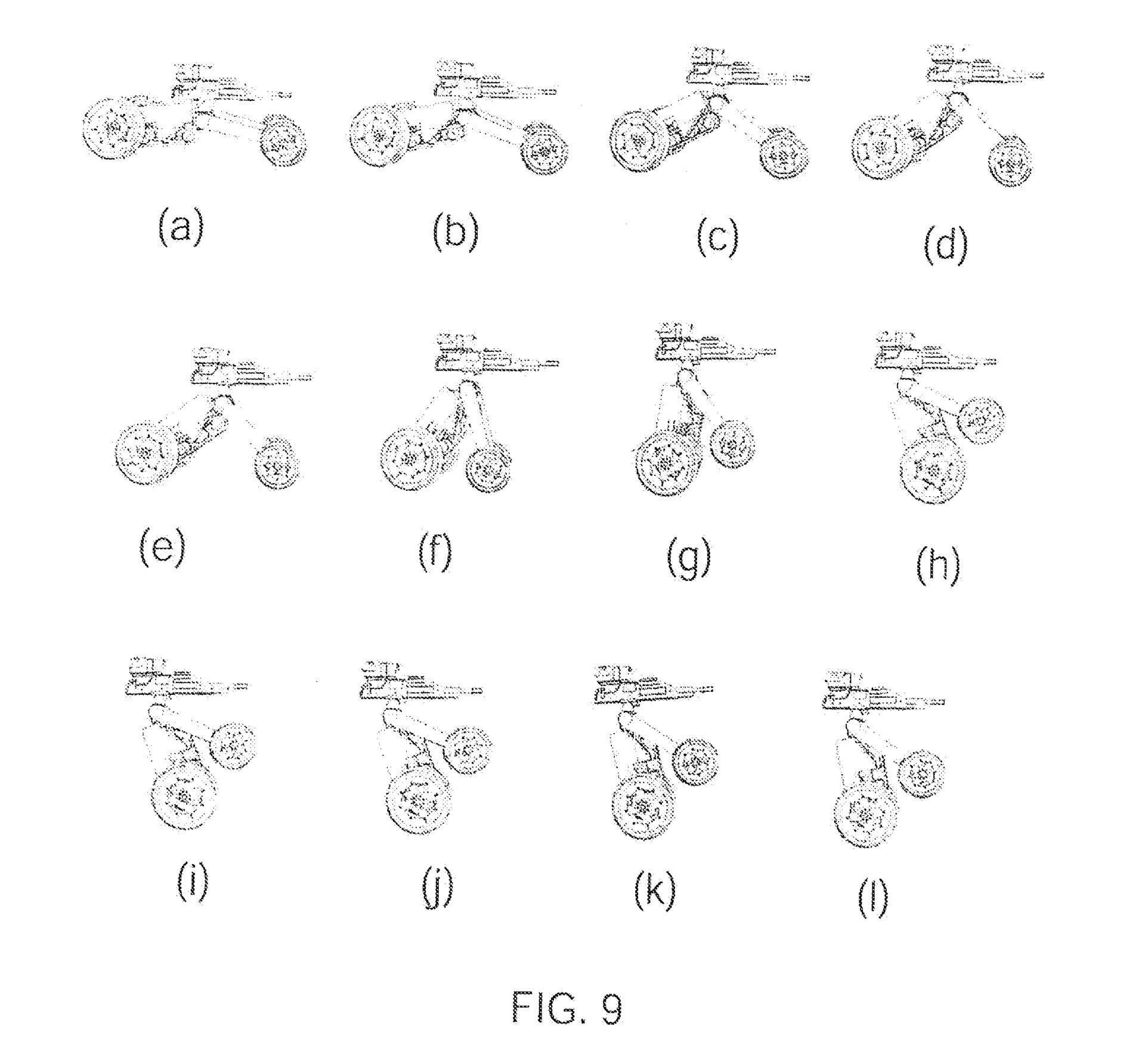
可動、作動:
"An actuated joint located between the rear ground contacting members and the front ground contacting members is used to raise the Center of Mass when transitioning between the low Center of Mass configuration and the high Center of Mass configuration"
接触:
1) "The control signal sent by the control system is related to a measurement of the robot's Center of Mass with respect to the contact point of the wheels that are contacting the ground."
2) "Comparator 8220 determines whether the front base of the vehicle has made contact with the ground."
3) "When in the A-frame configuration, both the rear ground contacting member and the front ground contacting member are in contact with the ground."
搭載、載置、配設:
"Such a measurement could come from a gyroscope mounted in the base, an inertial measurement unit mounted in the base, a camera system mounted to the base or arms, or other means."
取付:
"In this embodiment, track system 80 is attached to base 20. Turret 90 is also attached to base 20, and camera system 110 is attached to turret 90."
接続:
"FIGS. 5(a) and 5(b) show a simplified embodiment of the invention in a low Center of Mass configuration and a high Center of Mass configuration, respectively. Rear drive wheel 205 is connected to rear base 210."
乗り越える:
"Track system 80 can be used in order to get over rough terrain."
図番:
"FIG. 3 shows a perspective view of the embodiment of FIG. 1 and FIG. 2(省略してない)
動力継手、関節、ジョイント:
"Powered joint 220 is connected to rear base 210. Powered joint 220 may also be powered by various means, including electric or hydraulic motors."
ロードする、読み込む:
"When Stand-Up command 7000 is received, watchdog timer 7100 is loaded with the expected time required for the operation."
同時に:
"Lifting torque is also applied to the drive(s) of the arm attachment joint concurrently with the application of torque to the ground-contacting members as indicated by step 7130."
比較:
"Comparator 7140 makes this determination by comparing input data provided by a sensor to the predefined threshold angle."
見る、確認、参照する:
"If the robot has not attained the threshold angle comparator 7140 looks to comparator 7150 to determine if the timer of watchdog timer 7100 has expired."
走行:
"drive over obstacle 700, while arm wheels 60, 61 regain contact with the ground (d); finishes driving over obstacle 700 using main drive wheels 30, 31 (e)"
向ける:
"During this maneuver, turret 90 can be operated to orient weapon system 100 to a desired orientation with respect to the ground, independent of the configuration of the robot."
用いて、により:
"determining suitable and/or optimal control system parameters using one of a number of different mathematical control system tools."
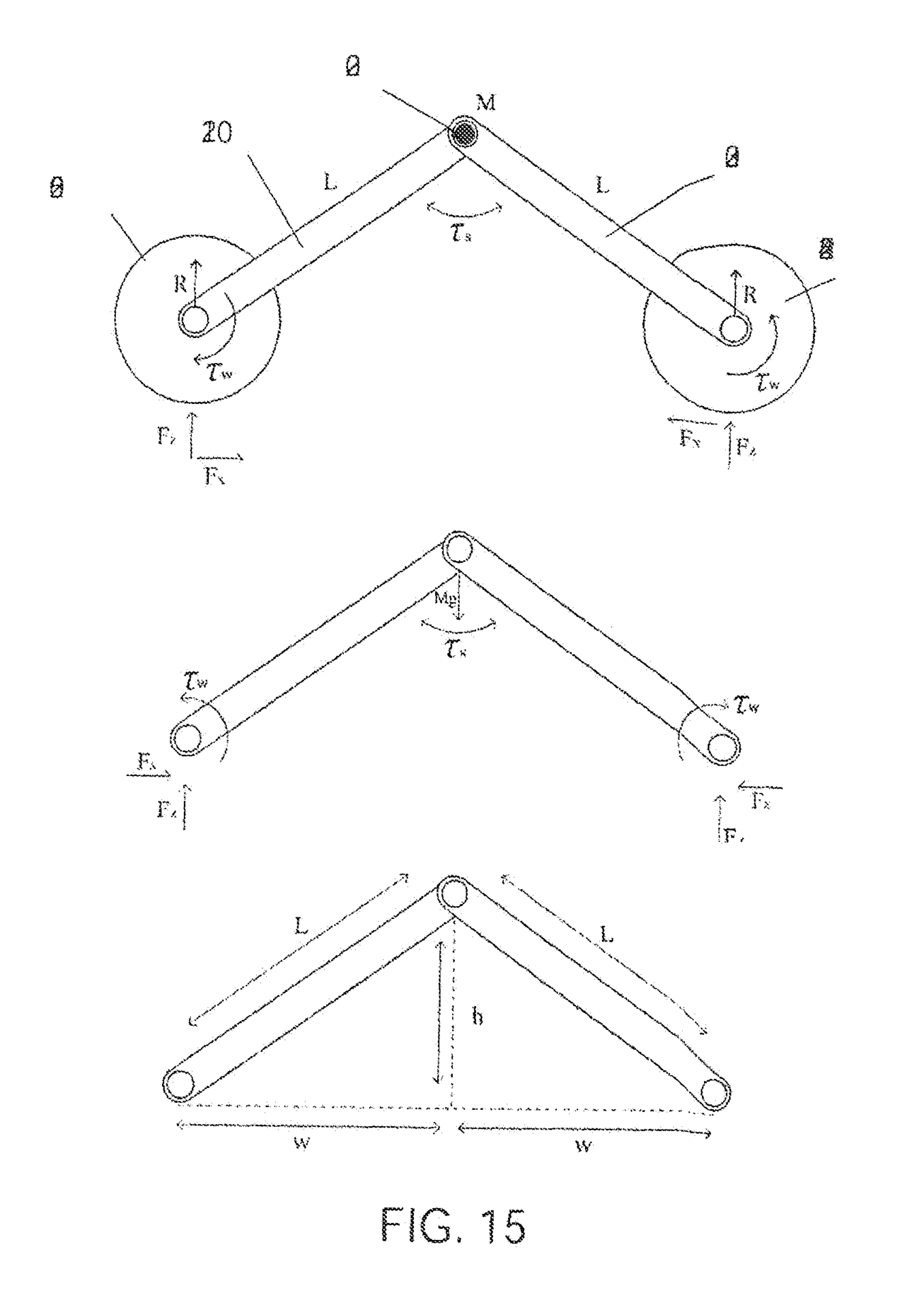
略図:
"FIG. 15 shows a schematic of a specific embodiment of the invention that can be used to compute the wheel and shoulder motor torques that can be applied to transition from a low Center of Mass configuration to an A-frame configuration."