








3次元空間内の図形である正多面体は、正4面体、正6面体など5種類しか存在しない。4次元空間内で正多面体に相当する独自の立体は、正多胞体と呼ばれる。正n胞体は、6種類(n=5,8,16,24,120,600)存在するという。
4次元正多面体の入門コースとして、正5胞体を構成することによってその世界を体験することにした。
正4面体および正5胞体を構成する方法として、参考文献の方法が分かりやすいので、使わせてもらう。まず正4面体の構成から始める。
xy平面上に正3角形を設定する。その重心は原点Oにあるとする。重心点をz軸に沿ってある高さhまで持ち上げる。例えば、正3角形の頂点をA(2,0,0);B(-1,SQRT(3),0);C(-1,-SQRT(3),0)とすると、重心を第4の頂点D(0,0,h)まで持ち上げればよい。線分ABの長さが2SQRT(3)であるので、線分ADの長さを同じとすることによって、h=2SQRT(2)が一意に決まる。頂点Dにはその頂点を共有する底面3角形と合同な3枚の正3角形が隙間なく敷きつめられ、底面3角形が加わって正4面体が完成する。
次に、正5胞体の構成について述べる。3次元空間内に原点Oをその重心とする正4面体を設定する。例えば、正4面体の頂点をA’(1,1,1,0);B’(-1,-1,1,0);C’(1,-1,-1,0);D’(-1,1,-1,0)とする。ここで線分A’B’の長さは2SQRT(2)である。重心を第5の頂点E(0,0,0,h)まで持ち上げる。重心と各頂点を結ぶ同じ長さSQRT(3)の線分をスポークと呼ぶ。
正5胞体のE以外の頂点をA(1,1,1,w1);B(-1,-1,1,w2);C(1,-1,-1,w3);D(-1,1,-1,w4)とする。各頂点間の長さがすべて2SQRT(2)とする方程式ができるが、それを解くと、
w1=w2=w3=w4; w1-h=SQRT(5)または-SQRT(5)
が得られる。スポークAOの長さがスポークEOの長さに等しくかつh>0の条件からh=4/SQRT(5),w1~w4=-1/SQRT(5)が決まる。
この結果、長さがSQRT(3)であったスポークが延びて4/SQRT(5)になっていることが分かる。A,B,C,D各頂点間の長さは2SQRT(2)のままで元の長さと変わらない。ここで頂点Eにはその頂点を共有し、底面の正4面体と合同な4個の正4面体が隙間なく敷きつめられている。この4個の正4面体に、底面の正4面体と合同な正4面体ABCDが加わって正5胞体を構成する。
正5胞体を構成する各正4面体を3次元空間の図形として表現することは、正4面体のスケールを表現できないため不可能であるが、スケールを無視して各正4面体が他の正4面体と3角形を介して接合している状態を可視化することは可能である。3次元空間において、重心(原点O)を正5胞体の頂点Eとみなす。そうすると、頂点Eを共有する4個の4面体ABCE,BCDE,ACDE,ABDEと、Eを共有しない4面体ABCDとが存在する。
例えば4面体ABCEは、他の4個の4面体と3角形ABE,BCE,ACE,ABCを共有している。他の4面体についても同様である。どの4面体をとっても、他の4個の4面体と3角形を介して接合しているのが分かる。
2次元空間において、正3角形ABCを基にして正4面体を構成することは無理であるが、その正3角形の重心となる原点Oを第4の頂点Dとみなせば、Dと各頂点を結ぶ線分は、3個の3角形のうちの2つによって共有される線分であることが可視化される。
この正5胞体の3次元直交射影を得るには、正5胞体ABCDEの各頂点の第4成分を0にするだけでよい。その結果、正4面体A’B’C’D’が得られ、頂点Eは原点O(重心)に射影される。スポークは元の長さSQRT(3)に収縮する。
ここで、頂点Eを他の頂点A,B,C,Dのいずれかと置き換えても同じ3次元直交射影が得られる。つまり、5つの同型の直交射影が存在する(3次元正4面体でも同様ではあるが)。
3次元直交射影された正4面体A’B’C’D’の’をとってABCDとみなすことにし、この正4面体の2次元直交射影の図を表示したい。
ここで正4面体ABCDの各頂点の座標値をA(0,2,-SQRT(2)/2);B(-SQRT(3),-1,-SQRT(2)/2);C(SQRT(3),-1,-SQRT(2)/2);D(0,0,3SQRT(2)/2)のように変更する。原点Oは頂点Eの射影となる。そうすると、2次元直交射影は、正4面体ABCDをxz平面上に射影したものとなる。
以下に正4面体ABCDの2次元射影を図示する。
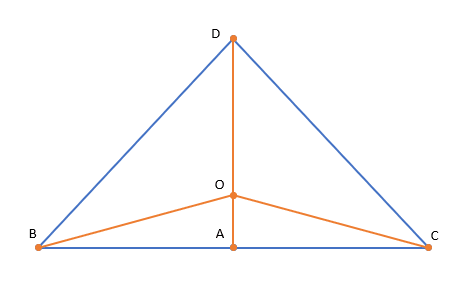
原点O(重心)から各頂点にのびる赤い線分がスポークである。原点Oは線分BCより上に位置するので、重心Oが底面ABCより上にある様子がみてとれる。
多胞体とは、4次元空間においてその中に複数の正多面体を隙間なく詰め合わせるジグソー・パズルのようなものらしい(立体パズルとも言われる)。こうなると、正5胞体だけでは物足りなくなり、正16胞体のようなさらに高度な正多胞体を体験したくなってきた。
参考文献
数学セミナー2021年9月号: 平澤美可三著「4次元正多面体入門」(日本評論社)
4次元正多面体の入門コースとして、正5胞体を構成することによってその世界を体験することにした。
正4面体および正5胞体を構成する方法として、参考文献の方法が分かりやすいので、使わせてもらう。まず正4面体の構成から始める。
xy平面上に正3角形を設定する。その重心は原点Oにあるとする。重心点をz軸に沿ってある高さhまで持ち上げる。例えば、正3角形の頂点をA(2,0,0);B(-1,SQRT(3),0);C(-1,-SQRT(3),0)とすると、重心を第4の頂点D(0,0,h)まで持ち上げればよい。線分ABの長さが2SQRT(3)であるので、線分ADの長さを同じとすることによって、h=2SQRT(2)が一意に決まる。頂点Dにはその頂点を共有する底面3角形と合同な3枚の正3角形が隙間なく敷きつめられ、底面3角形が加わって正4面体が完成する。
次に、正5胞体の構成について述べる。3次元空間内に原点Oをその重心とする正4面体を設定する。例えば、正4面体の頂点をA’(1,1,1,0);B’(-1,-1,1,0);C’(1,-1,-1,0);D’(-1,1,-1,0)とする。ここで線分A’B’の長さは2SQRT(2)である。重心を第5の頂点E(0,0,0,h)まで持ち上げる。重心と各頂点を結ぶ同じ長さSQRT(3)の線分をスポークと呼ぶ。
正5胞体のE以外の頂点をA(1,1,1,w1);B(-1,-1,1,w2);C(1,-1,-1,w3);D(-1,1,-1,w4)とする。各頂点間の長さがすべて2SQRT(2)とする方程式ができるが、それを解くと、
w1=w2=w3=w4; w1-h=SQRT(5)または-SQRT(5)
が得られる。スポークAOの長さがスポークEOの長さに等しくかつh>0の条件からh=4/SQRT(5),w1~w4=-1/SQRT(5)が決まる。
この結果、長さがSQRT(3)であったスポークが延びて4/SQRT(5)になっていることが分かる。A,B,C,D各頂点間の長さは2SQRT(2)のままで元の長さと変わらない。ここで頂点Eにはその頂点を共有し、底面の正4面体と合同な4個の正4面体が隙間なく敷きつめられている。この4個の正4面体に、底面の正4面体と合同な正4面体ABCDが加わって正5胞体を構成する。
正5胞体を構成する各正4面体を3次元空間の図形として表現することは、正4面体のスケールを表現できないため不可能であるが、スケールを無視して各正4面体が他の正4面体と3角形を介して接合している状態を可視化することは可能である。3次元空間において、重心(原点O)を正5胞体の頂点Eとみなす。そうすると、頂点Eを共有する4個の4面体ABCE,BCDE,ACDE,ABDEと、Eを共有しない4面体ABCDとが存在する。
例えば4面体ABCEは、他の4個の4面体と3角形ABE,BCE,ACE,ABCを共有している。他の4面体についても同様である。どの4面体をとっても、他の4個の4面体と3角形を介して接合しているのが分かる。
2次元空間において、正3角形ABCを基にして正4面体を構成することは無理であるが、その正3角形の重心となる原点Oを第4の頂点Dとみなせば、Dと各頂点を結ぶ線分は、3個の3角形のうちの2つによって共有される線分であることが可視化される。
この正5胞体の3次元直交射影を得るには、正5胞体ABCDEの各頂点の第4成分を0にするだけでよい。その結果、正4面体A’B’C’D’が得られ、頂点Eは原点O(重心)に射影される。スポークは元の長さSQRT(3)に収縮する。
ここで、頂点Eを他の頂点A,B,C,Dのいずれかと置き換えても同じ3次元直交射影が得られる。つまり、5つの同型の直交射影が存在する(3次元正4面体でも同様ではあるが)。
3次元直交射影された正4面体A’B’C’D’の’をとってABCDとみなすことにし、この正4面体の2次元直交射影の図を表示したい。
ここで正4面体ABCDの各頂点の座標値をA(0,2,-SQRT(2)/2);B(-SQRT(3),-1,-SQRT(2)/2);C(SQRT(3),-1,-SQRT(2)/2);D(0,0,3SQRT(2)/2)のように変更する。原点Oは頂点Eの射影となる。そうすると、2次元直交射影は、正4面体ABCDをxz平面上に射影したものとなる。
以下に正4面体ABCDの2次元射影を図示する。
原点O(重心)から各頂点にのびる赤い線分がスポークである。原点Oは線分BCより上に位置するので、重心Oが底面ABCより上にある様子がみてとれる。
多胞体とは、4次元空間においてその中に複数の正多面体を隙間なく詰め合わせるジグソー・パズルのようなものらしい(立体パズルとも言われる)。こうなると、正5胞体だけでは物足りなくなり、正16胞体のようなさらに高度な正多胞体を体験したくなってきた。
参考文献
数学セミナー2021年9月号: 平澤美可三著「4次元正多面体入門」(日本評論社)