








「石破おろし」なんて騒いでますが、私は長期政権になると思います。
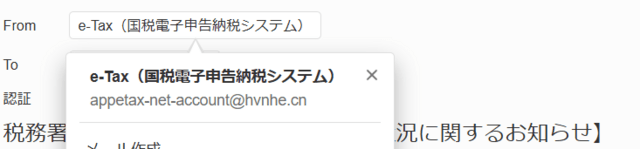
先日確定申告をe-Taxで済ませて数日後、税務署から【還付金の処理状況に関するお知らせ】なるメールが届いた。
以下、メール文面のスクショ。

E-taxアカウントを作成しろと言う。(アカウント?昨年作ったじゃないか!また作るんかい?税務署のアホはまた面倒なことを・・・)とイラつきながらアドレスをクリックし住所氏名を入力後、「オンライン入金のため」と言うので、消費税のオンライン納付かと思い、クレジットカード番号を入力してしまった。
カード会社からのパスワードがSMSで携帯番号に届くと言うが何度リセットしても届かないのでおかしいと思い10分経過、さらにはやはりアカウントは既に持っているはずなのに変だと思い税務署に電話すると、そんなメールは送信してないと言う。
送信アドレスを見るとやはり詐欺。
すぐにカード会社に電話してカードを止めました。10日で新カードを発行してくれるという。
しかし番号入力から停止まで約20分が経過した。この間何か購入されたかも。
改めてメールを見るとおかしな点に気付く。
1.字体が微妙に不自然、ねじれたりブレている、「さ」とか「い」の角度・形が微妙に変。
正しい税務署からのメール

2.受信者の氏名が書いてない。
3.e-Tax, E-Taxと、記載に統一が無い。
3.「還付金の電子発行」なんて意味不明。
いやまったくアホなことをしてしまいました。普段詐欺に騙される人をあからさまにバカにしているのに・・・。
あ、あふりか象が好きっ!!
US2024132100(CONTINENTAL AUTONOMOUS MOBILITY GERMANY GMBH [DE])
For example, the vehicle
例えば、車両は、
can adjust the speed and the manner in which the vehicle follows a car driving ahead,
e.g., by means of an Emergency Brake Assist (EBA),
例えば、緊急制動支援(EBA:Electronic Brake Assist(緊急ブレーキアシスト))、
Automatic Emergency Brake (AEB) or Adaptive Cruise Control (ACC).
自動緊急ブレーキ(AEB:Automatic Emergency Brake)またはアダプティブクルーズコントロール(ACC:Adaptive Cruise Control)を用いて、
速度制御または追従走行制御を行うことができる。
US2022194375(TOYOTA MOTOR CO LTD [JP])
[0018] The leading vehicle V 0 is an autonomous driving vehicle capable of autonomous driving. The autonomous driving vehicle is a vehicle that does not require a driving operation by a driver and is capable of autonomous travel control that causes the vehicle V to autonomously travel.
【0015】
先頭車両V0は、自動運転が可能な自動運転車両である。自動運転車両は、ドライバによる運転操作が要されず、自動で車両Vを走行させる自動走行制御が可能な車両である。
The vehicles V other than the leading vehicle V 0 are partially autonomous driving vehicles.
先頭車両V0以外の車両Vは、部分的な自動運転車両である。
The partially autonomous driving vehicle does not require a driving operation by a driver, but is a vehicle in which the external sensor 23 described later is not mounted on the vehicle or the function is limited.
部分的な自動運転車両は、ドライバによる運転操作は要されないが、後述する外部センサ3が車載されていない又はその機能が限定的な車両である。
The partially autonomous driving vehicle is, for example, a vehicle whose autonomous driving level is lower than that of the leading vehicle V 0 .
部分的な自動運転車両は、例えば自動運転レベルが先頭車両V0よりも低い車両である。
The partially autonomous driving vehicle is, for example, a vehicle that performs following travel using vehicle-to-vehicle communication and road-to-vehicle communication.
部分的な自動運転車両は、例えば車車間通信及び路車間通信を利用した追従走行を行う車両である。
The following vehicle V 1 may be a vehicle V that follows immediately after the leading vehicle V 0 , or may be a vehicle V that follows the leading vehicle via one or more vehicles V.
なお、追従車両V1は、先頭車両V0の直後に追従する車両Vであってもよいし、先頭車両に1台以上の車両Vを介して追従する車両Vであってもよい。
The vehicle V that follows immediately after the leading vehicle V 0 is the vehicle V second from the front among the plurality of vehicles V that travel in a platoon.
先頭車両V0の直後に追従する車両Vとは、隊列走行する複数の車両Vのうち前から2台目の車両Vである。
US11997573(SONY GROUP CORP [JP])
[0135] The automatic driving control unit 112 performs control related to automatic driving such as autonomous traveling or driving assistance.
【0104】
自動運転制御部112は、自律走行又は運転支援等の自動運転に関する制御を行う。
Specifically, for example, the automatic driving control unit 112
具体的には、例えば、自動運転制御部112は、
performs cooperative control for the purpose of realizing the functions of the advanced driver assistance system (ADAS) including
collision avoidance or impact reduction of the own car, follow-up traveling based on the inter-vehicle distance, constant vehicle speed traveling, collision warning of the own car, lane deviation warning of the own car, or the like.
自車の衝突回避あるいは衝撃緩和、車間距離に基づく追従走行、車速維持走行、自車の衝突警告、又は、自車のレーン逸脱警告等
を含むADAS(Advanced Driver Assistance System)の機能実現を目的とした協調制御を行う。
Furthermore, for example, the automatic driving control unit 112 performs cooperative control for the purpose of automatic driving and the like that autonomously travels without depending on the operation of the driver.
また、例えば、自動運転制御部112は、運転者の操作に拠らずに自律的に走行する自動運転等を目的とした協調制御を行う。
The automatic driving control unit 112 includes a detection unit 131 , a self-position estimation unit 132 , a situation analysis unit 133 , a planning unit 134 , and an operation control unit 135 .
自動運転制御部112は、検出部131、自己位置推定部132、状況分析部133、計画部134、及び、動作制御部135を備える。
US11667287(HONDA MOTOR CO LTD [JP])
[0035] The following unit 251 acquires the leading information from the preceding vehicle 200 via the communication device 25 a .
【0028】
追従走行部251は、通信装置25aを通じて先行車両200から先導情報を取得する。
The following unit 251 automatically controls travelling of the following vehicle 250 (specifically, driving amounts of actuators relating to driving, braking, and steering) to follow the preceding vehicle 200 , based on the leading information.
追従走行部251は、先導情報に基づいて、先行車両200を追従するように後続車両250の走行(具体的に、駆動、制動及び操舵に関するアクチュエータの駆動量)を自動的に制御する。
US2023069005(MITSUBISHI ELECTRIC CORP [JP])
[0031] FIG. 1 is a diagram illustrating an example of a convoy in which vehicles constituting the convoy have different driving control functions.
図1は、隊列を構成する車両ごとに有する運転制御機能が異なる隊列の例を示す図である。
In FIG. 1 , a leading vehicle # 1 is a vehicle having a driving control function of at least one of autonomous driving, remote driving, and manual driving.
図1において、先頭車両#1は、自動運転、遠隔運転、又は手動運転のうちの少なくとも1つの運転制御機能を有する車両である。
Vehicles # 2 to # 9 are vehicles each having a driving control function only for following-travel driving and manual driving.
車両#2~#9は、追従走行運転及び手動運転のみ、運転制御機能を有する車両である。
The vehicle # 2 follows the leading vehicle # 1 by following-travel driving, the vehicle # 3 follows the preceding vehicle # 2 by following-travel driving,
車両#2が追従走行運転によって先頭車両#1に追従し、車両#3が追従走行運転によって前方の車両#2に追従し、
the vehicle # 4 follows the preceding vehicle # 3 by following-travel driving, the vehicle # 5 follows the preceding vehicle # 4 by following-travel driving,
車両#4が追従走行運転によって前方の車両#3に追従し、車両#5が追従走行運転によって前方の車両#4に追従し、
the vehicle # 6 follows the preceding vehicle # 5 by following-travel driving, the vehicle # 7 follows the preceding vehicle # 6 by following-travel driving,
車両#6が追従走行運転によって前方の車両#5に追従し、車両#7が追従走行運転によって前方の車両#6に追従し、
the vehicle # 8 follows the preceding vehicle # 7 by following-travel driving, and the vehicle # 9 follows the preceding vehicle # 8 by following-travel driving.
車両#8が追従走行運転によって前方の車両#7に追従し、車両#9が追従走行運転によって前方の車両#8に追従する。
ChatGPT:
あなた:
ChatGPT:
US2022310080(GOOGLE LLC [US])
When the utterance-level confidence score 350 fails to satisfy (e.g., is less than) the confidence threshold (e.g., decision block 450 is “No”),
【0070】
発声レベルコンフィデンススコア350がコンフィデンス閾値を満足していない場合(例えばコンフィデンス閾値未満である場合)(例えば決定ブロック450が「ノー」である)、
then the confidence-based routine rejects the transcription 204 generated by the first speech recognizer 200 and passes the audio data 202 to the second speech recognizer 402 for processing to re-transcribe the utterance 12 .
コンフィデンスベースのルーチンは、第1の音声認識装置200によって生成された表現形式204を拒否し、発声12を再転記する処理のために音響データ202を第2の音声認識装置402に引き渡す。
The transcription 204 generated by the second speech recognizer 402 may be passed back to the user device 110 and/or to the downstream NLU module for interpretation.
第2の音声認識装置402によって生成された表現形式204はユーザデバイス110に戻すことができ、および/または翻訳のために下流側のNLUモジュールに戻すことができる。
In examples where the first speech recognizer 200 is local and executing on-device 110 and the second speech recognizer 402 is server-side and executing on a remote server 410 ,
第1の音声認識装置200が局所で、かつ、デバイス110上で実行し、また、第2の音声認識装置402がサーバ側で、かつ、遠隔サーバ410上で実行する例では、
the confidence-based routine causes the user device 110 to transmit the audio data 202 to the remote server 410 via a network (not shown) so that the second speech recognizer 402 executing thereon can transcribe the utterance 12 .
コンフィデンスベースのルーチンは、遠隔サーバ410上で実行する第2の音声認識装置402が発声12を転記することができるように、ユーザデバイス110に、ネットワーク(図示せず)を介して音響データ202を遠隔サーバ410に送信させる。
The second speech recognizer 402 may leverage a large language model trained on large-scale language model training data(*large-scaleはdataに係るのでは?)making the second speech recognizer 402 more suitable for recognizing proper nouns or less-common words not present in the training data used to train the first speech recognizer 200 .
第2の音声認識装置402は、大規模言語モデル訓練データ上で訓練された大型言語モデルを利用して、第2の音声認識装置402を適切な名詞の認識により適したものにすることができ、あるいは第2の音声認識装置402を、第1の音声認識装置200を訓練するために使用される訓練データには存在していない共通ワードがより少ないものにすることができる。
US9619465(GOOGLE INC [US])
[0053] The translation quality of a statistical machine translation (SMT) system can generally be improved by increasing the size of either or both of the translation model (TM) and the language model (LM) of the system.
【0038】
統計的機械翻訳(SMT)システムの翻訳品質は、一般的に、システムの翻訳モデル(TM)及び言語モデル(LM)のいずれか又は双方のサイズを大きくすることによって、改善し得る。
Hence, the system 200 may have large translation and language models that need partition in practical implementations in part due to the limited storage capacity in a single machine.
従って、システム200は、部分的には、単一の機械における限定された記憶容量のために、実用的な実施例では、区画を必要とする大きな翻訳及び言語モデルを有し得る。
As an example, large language models for English can be derived from about 200 billion words to 8 trillion words and are from about 1 Terabyte to 4 Terabytes in size.
一例として、英語用の大規模言語モデルは、約2千億語乃至8兆語から導出することができ、また、サイズが、約1テラバイト乃至4テラバイトである。
A large TM may be on the order of magnitude of 200 million words or larger. As more documents are made available on line, the LM may increase further in size.
大きなTMは、2億語以上の大きさのオーダであってよい。より多くの文書がオンラインで利用可能になるにつれて、LMは、サイズが、更に増大し得る。
Hence, partition provides an effective approach to high-quality MT systems using the distributed machine processing.
従って、区画は、分散型機械処理を用いて、高品質MTシステムへの効果的な手法を提供する。
Replication and load balancing can also be used in such DMT systems and other MT systems based on large language and translation models.
複製及び負荷分散は、大きな言語及び翻訳モデルに基づき、そのようなDMTシステム及び他のMTシステムにも用い得る。
ChatGPT:
US2021119401(IPG PHOTONICS CORP [US])
[0001] The disclosure relates to a high-power Yb:Er fiber laser system with the suppressed onset of Yb lasing in a 1 micron nm wavelength range.
【0001】
本開示は、1ミクロンnm波長範囲にYbレーザー発振の開始(onset)を抑制した高出力Yb:Erファイバーレーザーシステムに関する。
In particular, the disclosure relates to a high power fiber oscillator and amplifier based on Yb:Er doped fiber which is clad pumped in 1020-1060 nm wavelength range.
詳細には、本開示は、1020~1060nm波長範囲でクラッド励起される(clad pumped)Yb:Er添加ファイバーをベースとする高出力ファイバー発振器および増幅器に関する。
WO2009100113(IMRA AMERICA INC [US])
[71] Multicore fibers can also be side-pumped as shown in Fig. 5, which shown a side-pumping arrangement 300 for a multi-core fiber 301.
【0052】
マルチコア・ファイバは、マルチコア・ファイバ301のためのサイドポンピング配置300を示す図5に示されているように、サイドポンプされることもある。
Multicore fiber array 301 comprises a larger diameter solid-glass rod.
マルチコア・ファイバアレイ301は、より大きい径のソリッドガラス・ロッドを含む。
V- grooves 302 and optionally 303 are then cut into the side of the multi-core fiber.
V字溝302、及び、場合によっては303が、その後に、マルチコア・ファイバの側面に切り込まれる。
The multi-core fiber comprises individual cores 304 - 306; only three cores are shown but larger numbers of cores are also possible.
マルチコア・ファイバは、個別のコア304~306を含み、3個のコアだけが示されているが、より多数のコアも又、可能である。
V-grooves 302 and 303 are used to direct pump light into the multi-core fiber structure, where the pump light is designated with the arrows 307 and 308.
V字溝302及び303は、ポンプ光をマルチコア・ファイバ構造体に向けるため使用され、ポンプ光は矢印307及び308で指定されている。
This pumping scheme is very similar to the those described for single core fibers in U.S. patent 5,854,865 entitled "Method for coupling light into cladding-pumped fiber sources using embedded mirrors", and U.S. patent 6,704,479 entitled "Method and apparatus for side pumping a fiber". These and various other pumping configurations are well known for single-core fiber pumping and therefore not further described here.
このポンピング方式は、発明の名称が「埋込ミラーを用いたクラッド励起ファイバ光源への光結合の方法(Method for coupling light into cladding-pumped fiber sources using embedded mirrors)」である米国特許第5854865号明細書と、発明の名称が「ファイバのサイドポンピングの方法及び装置(Method and apparatus for side pumping a fiber)」である米国特許第6704479号明細書においてシングルコア・ファイバのため記載されているポンピング方式と非常に類似している。
US7916307(LOCKHEED CORP [US])
[0049] The fiber laser associated with the master oscillator and the fiber amplifier may be: (1) Ytterbium doped fibers operable to produce radiation at a wavelength of about 1000 nm; or (2) erbium doped or co-doped fibers operable to produce radiation at a wavelength of about 1550 nm.
【0041】
主発振器及びファイバ増幅器に伴うファイバレーザは(1)約1,000nmの波長の放射を生成するように動作可能なイッテルビウム注入ファイバ、又は(2)約1,550nmの波長の放射を生成するように動作可能なエルビウム注入又は共注入のファイバであってよい。
The fiber lasers may use side cladding pumping wherein pumping diodes are coupled to active fiber through pumping fibers.
このファイバレーザは側面被覆励起(側部クラッド励起)を使用可能であり、励起ダイオードは励起ファイバを介して能動ファイバに接続される。
US8520299(OFS FITEC LLC [US])
[0034] Rare-earth-doped amplifiers (e.g., those doped by Erbium (Er) or Ytterbium (Yb)), which produce high-power signals at around the 1.5-micrometer wavelength, are often cladding pumped, meaning that the pump is introduced into the cladding, which is not gain-doped.
【0023】
波長1.5ミクロンメータの付近に高出力信号を生成する(例えば、エルビウム(Er)、あるいはイッテルビウム(Yb)をドープされた)希土類ドープ増幅器はしばしばクラッド励起であって、励起光が利得ドープされていないクラッド中に導入されるということを意味する。
The pump light in the cladding, through various known reflective and refractive mechanisms, eventually enters the gain-doped region of the optical fiber, thereby resulting in population inversion in the gain-doped region.
クラッド中の励起光はいろいろ既知の反射、および屈折の機構を経てその結果、光ファイバの利得ドープされた領域に入り、利得ドープ領域内で分子反転させる結果となる。
当ブログの例文について
本ブログの「特許英語散策」等題した部分では、英語の例文を管理人の独断と偏見で収集し、適宜訳文・訳語を記載しています。
訳文等は原則として対応日本語公報をそのまま写したものです。私個人のコメント部分は(大抵)”*”を付しています。
訳語は多数の翻訳者の長年の努力の結晶ですが、誤訳、転記ミスもあると思いますのでご注意ください。





