









先日のブログで「自宅にMultiploが届いた」と書きましたが、それを使ってやっとロボットが完成しました。
N6というタイプのロボットに憧れてこのキットを購入したのですが、手元に来たキットのバージョンではN6ロボットを作ることができなくなっていました。いつのバージョンから作れなくなったのでしょうかね。
 オリジナルのN6ロボット
オリジナルのN6ロボット
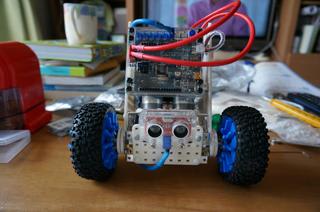
 私が作ったN6風ロボット
私が作ったN6風ロボット
一番の原因は付属しているモーターが大きくなってしまったため、横に並べてしまうとN6ロボットのスペースでは収まりきらなくなってしまったため、ラインナップの中から外してしまったのだと思います。
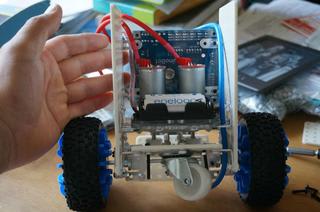
そこでモーターを横ではなく縦に2つ並べて、直角に動力を伝えるマイタという歯車を使い、実現しました。

付属していたパーツ以外に用意したものは


N6というタイプのロボットに憧れてこのキットを購入したのですが、手元に来たキットのバージョンではN6ロボットを作ることができなくなっていました。いつのバージョンから作れなくなったのでしょうかね。
オリジナルのN6ロボット私が作ったN6風ロボット一番の原因は付属しているモーターが大きくなってしまったため、横に並べてしまうとN6ロボットのスペースでは収まりきらなくなってしまったため、ラインナップの中から外してしまったのだと思います。
そこでモーターを横ではなく縦に2つ並べて、直角に動力を伝えるマイタという歯車を使い、実現しました。
付属していたパーツ以外に用意したものは
先ほど話にあったマイタ(タップを切って、3mmのイモビスを入れた)
4mmのアルミ棒
4mm平ワッシャー
5mmのナット(スペーサー代わり)
です。4mmのアルミ棒
4mm平ワッシャー
5mmのナット(スペーサー代わり)
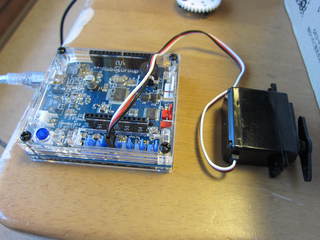
Arduinoに似たマイコン、DuinoBot v1.2を使ってみました。
ここまで来たらバラしてしまいますが、実は先日Multiploが届いたのです。
これは知っている人は知っている(知らない人は全く知らないが・・)組み立てロボットです。
そのMultiploの頭脳とも言えるマイコンボードがDuinoBot v1.2なのです。
搭載マイコンはArduino leonardoと同じATmega32u4を使っています。
しかし、大きく違うのがモーターを動かすための端子が予めあることです。
もちろん、センサーなどをつなぐためのピンソケットもあります。
基本はMinibloqで作成したスケッチで動かしますが、ArduinoIDEで作成したスケッチも転送できるようです。
またまた、私が困ってしまったことをここに書いておきます。
MinibloqでExamplesで選んだスケッチをDuinoBotに転送しようとした時、どのマイコンを選べばよいのかです。
DuinoBot.v1.x.HIDを選んでください。
PortはHIDが自動で表示されますが、そのままです。
Arduinoに慣れきってしまうとPortが選択できなということは、PCがマイコンを認識していないと思い込んでしまいますが、このマイコンの場合は関係ないみたいです。
ここまで来たらバラしてしまいますが、実は先日Multiploが届いたのです。
これは知っている人は知っている(知らない人は全く知らないが・・)組み立てロボットです。
そのMultiploの頭脳とも言えるマイコンボードがDuinoBot v1.2なのです。
搭載マイコンはArduino leonardoと同じATmega32u4を使っています。
しかし、大きく違うのがモーターを動かすための端子が予めあることです。
もちろん、センサーなどをつなぐためのピンソケットもあります。
基本はMinibloqで作成したスケッチで動かしますが、ArduinoIDEで作成したスケッチも転送できるようです。
またまた、私が困ってしまったことをここに書いておきます。
MinibloqでExamplesで選んだスケッチをDuinoBotに転送しようとした時、どのマイコンを選べばよいのかです。
DuinoBot.v1.x.HIDを選んでください。
PortはHIDが自動で表示されますが、そのままです。
Arduinoに慣れきってしまうとPortが選択できなということは、PCがマイコンを認識していないと思い込んでしまいますが、このマイコンの場合は関係ないみたいです。

今までビジュアルプログラミング言語ってプログラミング入門向けの文部科学省のプログラミンとScratchしか知りませんでした。
今回、Arduinoに対応したビジュアルプログラミング言語をためしてみる機会があり使ってみました。
Minibloqです。
日本語での説明を探したのですがどこにもなく、とにかくトライアンドエラーの繰り返しでなんとなくですが、ブロックの意味を理解してきています。
ArduinoIDEを先に使い始めた私にとって、「ちょっと痒いところに手が届かない」という感じでちょっと残念な気がしていますが、逆にこれからプログラムを始める人達にとってはシンプルな方が理解しやすいということもあるのでしょう。
私と同じようにArduinoIDEからMinibloqを始める人にとってつまずくこと。
setup()が全てであって、loop()はないということです。
ここが最も大きな違いです。
機会があったらブロックの説明を日本語化してみたいですが、英語が苦手な私・・・
どなたかお願いいたします。
今回、Arduinoに対応したビジュアルプログラミング言語をためしてみる機会があり使ってみました。
Minibloqです。
日本語での説明を探したのですがどこにもなく、とにかくトライアンドエラーの繰り返しでなんとなくですが、ブロックの意味を理解してきています。
ArduinoIDEを先に使い始めた私にとって、「ちょっと痒いところに手が届かない」という感じでちょっと残念な気がしていますが、逆にこれからプログラムを始める人達にとってはシンプルな方が理解しやすいということもあるのでしょう。
私と同じようにArduinoIDEからMinibloqを始める人にとってつまずくこと。
setup()が全てであって、loop()はないということです。
ここが最も大きな違いです。
機会があったらブロックの説明を日本語化してみたいですが、英語が苦手な私・・・
どなたかお願いいたします。