








King2の付属ジャイロはレートジャイロでしたが
King3はヘッドロックジャイロが付いています♪
King3においてのジャイロのセッティングですが
先ずはラダーのニュートラルを出します。
機体のモーターが回らないようにモーターへの束線を外します。
送信機のジャイロ切り替えはヘッドロックモードにしておきます。
純正付属のプロポの場合は、GYRO.SWを"0"側にしておきます。
また、ラダートリムも中央にしておきます。
その後、送信機の電源、受信機の電源を入れます。
受信機の電源が入った後しばらく機体を動かさないようにします。
その時のジャイロのLEDランプは初期のイニシャライズ動作でしばらく点滅。
その後、点灯に変わると思います。
《ラダーサーボのニュートラルの確認調整》
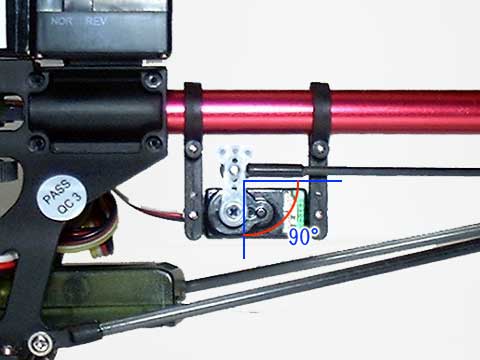
コントロールするロッドに対してサーボホーンが直角になっているかを確認します。
直角になっていない場合は、サーボ本体からサーボホーンを取り外し
できるだけ直角になる位置に再セットします。
(RTFの場合は問題無い位置に有ると思います。)

次に送信機のラダースティックを左右に動かして
テールスライダーに無理が掛かっていないかを確認します。
そして最大に動く位置に調整します。

無理が掛かっている場合は、ラダーサーボの位置を前後の移動と
ジャイロのLimitボリュームの動作角の調整にて、無理が無く動く位置に調整します。
私の場合、Limitボリュームは最小値になりました。
この調整でマニュアルに書かれている調整になっていると思います。
この後は実際に飛行させてのジャイロ感度の調整となります。
《EK2-704B ヘッドロックジャイロについて。》
Limit:サーボの最大動作角の調整。
Delay:反応速度の調整。
REV/NOR:ノーマル、リバースの切り替え。
ジャイロのLEDランプの意味ですが。
点滅:ジャイロのイニシャライズ
点灯状態:ジャイロのヘッドロックロックモード
消灯状態:ジャイロのOFFもしくはレートジャイロモード
ゆっくりした点滅:送信機からのテールサーボコントロール信号が受信できません。
間欠した点滅:ジャイロ感度切り替え信号が接続されていません。
もしくはイニシャライズ中にニュートラル信号がずれました。
また、ヘッドロックモード時にラダーをコントロールするとランプが消灯します。
*2.4GHzプロポの場合、送信機の電源を入れ、
その後受信機の電源を入れてからサーボが動作するまでにかなりの時間が掛かる事が有ります。
(30秒くらい掛かる事もありました。)
その時のジャイロのLEDランプの動作は初め間欠した点滅で、
受信機が起動して各サーボが動作できるようになってから
ジャイロのイニシャライズ動作の点滅となります。
*イニシャライズ時はヘッドロックモードで無くてもイニシャライズはするようですが、
ヘッドロックモードの確認もできますので、
ヘッドロックモードで起動させた方が良いと思います。
*起動時にラダーのトリムがずれた状態になっていると
ずれた位置がニュートラルとなります。
が、動作角には影響が有りません。
*ジャイロのDelayボリュームはGainという文字も有り感度かな?
と思いましたが、これはただのDelayのようです。
高速なサーボ程Delayは少なく、遅いサーボは多くとなると思いますが
サーボとの相性が有ると思います。
King3はヘッドロックジャイロが付いています♪
King3においてのジャイロのセッティングですが
先ずはラダーのニュートラルを出します。
機体のモーターが回らないようにモーターへの束線を外します。
送信機のジャイロ切り替えはヘッドロックモードにしておきます。
純正付属のプロポの場合は、GYRO.SWを"0"側にしておきます。
また、ラダートリムも中央にしておきます。
その後、送信機の電源、受信機の電源を入れます。
受信機の電源が入った後しばらく機体を動かさないようにします。
その時のジャイロのLEDランプは初期のイニシャライズ動作でしばらく点滅。
その後、点灯に変わると思います。
《ラダーサーボのニュートラルの確認調整》
コントロールするロッドに対してサーボホーンが直角になっているかを確認します。
直角になっていない場合は、サーボ本体からサーボホーンを取り外し
できるだけ直角になる位置に再セットします。
(RTFの場合は問題無い位置に有ると思います。)
次に送信機のラダースティックを左右に動かして
テールスライダーに無理が掛かっていないかを確認します。
そして最大に動く位置に調整します。
無理が掛かっている場合は、ラダーサーボの位置を前後の移動と
ジャイロのLimitボリュームの動作角の調整にて、無理が無く動く位置に調整します。
私の場合、Limitボリュームは最小値になりました。
この調整でマニュアルに書かれている調整になっていると思います。
この後は実際に飛行させてのジャイロ感度の調整となります。
《EK2-704B ヘッドロックジャイロについて。》
Limit:サーボの最大動作角の調整。
Delay:反応速度の調整。
REV/NOR:ノーマル、リバースの切り替え。
ジャイロのLEDランプの意味ですが。
点滅:ジャイロのイニシャライズ
点灯状態:ジャイロのヘッドロックロックモード
消灯状態:ジャイロのOFFもしくはレートジャイロモード
ゆっくりした点滅:送信機からのテールサーボコントロール信号が受信できません。
間欠した点滅:ジャイロ感度切り替え信号が接続されていません。
もしくはイニシャライズ中にニュートラル信号がずれました。
また、ヘッドロックモード時にラダーをコントロールするとランプが消灯します。
*2.4GHzプロポの場合、送信機の電源を入れ、
その後受信機の電源を入れてからサーボが動作するまでにかなりの時間が掛かる事が有ります。
(30秒くらい掛かる事もありました。)
その時のジャイロのLEDランプの動作は初め間欠した点滅で、
受信機が起動して各サーボが動作できるようになってから
ジャイロのイニシャライズ動作の点滅となります。
*イニシャライズ時はヘッドロックモードで無くてもイニシャライズはするようですが、
ヘッドロックモードの確認もできますので、
ヘッドロックモードで起動させた方が良いと思います。
*起動時にラダーのトリムがずれた状態になっていると
ずれた位置がニュートラルとなります。
が、動作角には影響が有りません。
*ジャイロのDelayボリュームはGainという文字も有り感度かな?
と思いましたが、これはただのDelayのようです。
高速なサーボ程Delayは少なく、遅いサーボは多くとなると思いますが
サーボとの相性が有ると思います。