








先日、ジャイロのセッティングについての質問が有りましたので
私のセッティングについて書いておきます。
ジャイロ本体、ジャイロについてはRTFの機体という事も有って
確認をしただけで何も触っていません。
今日、今の状態について見てみました。
使用プロポは、JR PCM9XⅡ Limitedを使用しています。
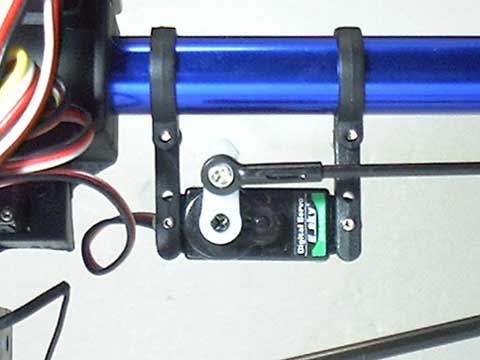
ジャイロサーボのニュートラル位置です。
電源投入時の位置になります。
ヘッドロックモードを外してノーマルモードでも
この位置がニュートラルになっています。
ニュートラルの位置が普通はずれている事が多いのですが
ラダーに関しては良い位置になっていました。
ラダー用は選別して取りつけているのでしょうか?
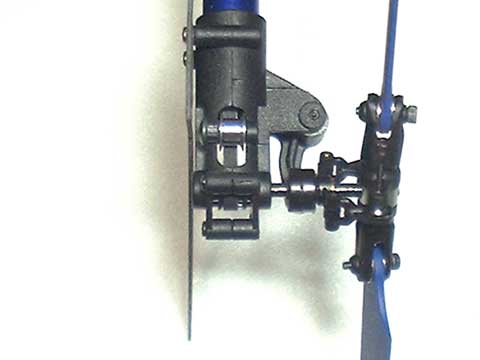
テール側の現在の状態です。

テールを裏側から見たところです。
この辺りもマニュアル通りくらいのセッティングになっています。
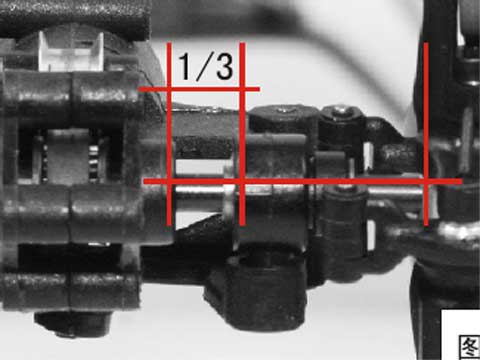
マニュアルではラダースティック位置で
テールのピッチが”0”のように書いてありますが
実際にはその通りではありませんでした。
少しピッチを付けた状態になっていました。
でも、これはこれで良いのでは??
と思います。
今回のこの機体は実施に飛ばしてもラダーの不安は有りませんでした。
ラダーの効きも良く効く位で、D/Rで通常使用の動作を抑えた位です。
今回のラダーサーボのニュートラル位置が良かったのでそのまま使いましたが
では、ずれていたらという事も考えてどのように合わせるかを試してみました。
まぁ、今までもこのジャイロはKing2でも使っていたのですが
あまり気にせず使っていました。
では、今日試した結果です。
ジャイロのサーボのサーボホーンの位置がテールパイプに対して直角で無い場合
プロポ側のジャイロ感度を0にしてノーマルモードにします。
そしてその時にサーボホーンの位置をサブトリムを使ってニュートラル位置を合わせます。
704Bのジャイロは電源投入時のニュートラル信号を監視しているらしく
電源投入時のニュートラル信号をニュートラル位置として扱ってくれるようです。
そして再度受信機の電源を投入すればニュートラルが合います。
その後、プロポ側のジャイロ感度を必要な感度に設定します。
不評な??704Bのジャイロですが、この機体では問題無く使えています。
私のセッティングについて書いておきます。
ジャイロ本体、ジャイロについてはRTFの機体という事も有って
確認をしただけで何も触っていません。
今日、今の状態について見てみました。
使用プロポは、JR PCM9XⅡ Limitedを使用しています。
ジャイロサーボのニュートラル位置です。
電源投入時の位置になります。
ヘッドロックモードを外してノーマルモードでも
この位置がニュートラルになっています。
ニュートラルの位置が普通はずれている事が多いのですが
ラダーに関しては良い位置になっていました。
ラダー用は選別して取りつけているのでしょうか?
テール側の現在の状態です。
テールを裏側から見たところです。
この辺りもマニュアル通りくらいのセッティングになっています。
マニュアルではラダースティック位置で
テールのピッチが”0”のように書いてありますが
実際にはその通りではありませんでした。
少しピッチを付けた状態になっていました。
でも、これはこれで良いのでは??
と思います。
今回のこの機体は実施に飛ばしてもラダーの不安は有りませんでした。
ラダーの効きも良く効く位で、D/Rで通常使用の動作を抑えた位です。
今回のラダーサーボのニュートラル位置が良かったのでそのまま使いましたが
では、ずれていたらという事も考えてどのように合わせるかを試してみました。
まぁ、今までもこのジャイロはKing2でも使っていたのですが
あまり気にせず使っていました。
では、今日試した結果です。
ジャイロのサーボのサーボホーンの位置がテールパイプに対して直角で無い場合
プロポ側のジャイロ感度を0にしてノーマルモードにします。
そしてその時にサーボホーンの位置をサブトリムを使ってニュートラル位置を合わせます。
704Bのジャイロは電源投入時のニュートラル信号を監視しているらしく
電源投入時のニュートラル信号をニュートラル位置として扱ってくれるようです。
そして再度受信機の電源を投入すればニュートラルが合います。
その後、プロポ側のジャイロ感度を必要な感度に設定します。
不評な??704Bのジャイロですが、この機体では問題無く使えています。
















これからも、参考にしながら拝見させていただきます。
私も704Bのジャイロに関してはあまり気にせずに使っていましたので
今回は発見が有りました^^
Belt CP V2ですが、今日も飛ばしてきました。
前のBelt CPは分からないのですが
このV2は良いですね。
私のブログでお役にたてれば幸いです♪