








テレビのサイエンス・ショウで、クラドニ図形を作成する実験を見た。振動させる正方形板を中心で支えて、板の上に細かい砂を一面にまいておいて、ふちをバイオリンの弓でこする。板に固有振動がおこると、砂は節線の所に集まって、いわゆるクラドニ図形が現れる。
そこで、この際、コンピュータ上でクラドニ図形をシミュレートして可視化できるものか試行することにした。
計算に当たっては、参考文献の実験値を利用させてもらうことにした。この実験は、アクリルの円板上に粒子をまいておいて、円板中心の下部に加振器を設け、円板に色々な周波数の振動を与える。振動数が円板の固有振動数になったとき、円板上に同心円状のクラドニ図形が現れる。円板は、動径(r)方向にリングを節とする定常波の形態で振動していることを示している。また、隣接する二つのリングを結ぶ放射状の線も見られる。
円板が固有振動モードになったとき、円板の振動は、動径方向の振動と偏角方向の振動とを重ね合わせたものになると考える。しかし、今回のシミュレーションでは、計算を簡単にするために、動径方向の振動のみに着目することにした。計算結果の数値にこだわるよりも固有振動モードという概念の可視化に重点をおくためでもある。
円板の半径は約8.7cmであり、得られている実験値は次の通りである。
振動数(Hz) リングの数 波長(cm)
395 2 5.8
622 3 4.4
1049 4 3.5
円板の中心は振動の湧き出し口になるので、複雑な振動波形となるであろう。中心に最も近い第1リング以後の動径rで安定な振動波形が得られているであろう。
第1リングと第2リング、第2リングと第3リング、第3リングと第4リングの間隔は、いずれも波長/2になっていると仮定した。また、最終リングから円板のふちまでは開放端であるので、波長/4になっていると仮定した。
この仮定をおくと、円板の中心から第1リングまでの間隔が計算できる。結果は、固有振動数の小さいものから順に4.3,3.2,2.6cmであり、振動数が上がるに従ってその間隔が小さくなる。
円板を打つなどすると振動するが、摩擦抵抗のために減衰振動となってやがて振動は停止する。加振器などにより円板に強制振動を加えると、振動は持続する。特に、外力の角振動数wが円板の固有角振動数w0に一致するとき、その振幅は最大値をとる。この現象は共振と呼ばれている。
円板は複数の固有振動モードをもつという観点からみれば、円板の振動は弦の振動と似ている。しかし、動径方向(r方向)のほかに偏角方向の振動が加わるので、弦の振動と同じではない。また、弦の振動と異なり、振動の湧き出し口があったり、動径方向の境界条件や円板面と垂直な方向の境界条件が異なり、複雑である。このため、固有振動数とリング数との間の関係式は得られない。
ここでは、固有振動数はともかくとして、リング数3の固有振動モードをシミュレーションの対象とした。
円板の上面をxy平面上においたとき、z方向の振動による垂直変位の境界条件は、z>0側で自由端、z<0側で円板実体から抗力を受けるので、z>0側の振幅auはz<0側の振幅adより大きくなるであろう。
z方向の変位は、平均場の理論に従うとすれば、円板のz方向の変位の時間平均は、振幅が(au-ad)/2の平均値となり、振動を表す関数は、この平均振幅と、たとえばsinrのように時間によらない場所だけの関数をもつ仮想振動パターンで定義できるだろう。この仮想振動モデルによって計算が容易になるので都合がよい。
ここで、この仮想振動モデルを検証するとともに、平均振幅を求める概略計算を行っておこう。
リング間に置かれた粒子が、微小な傾斜角度tをもつ摩擦抵抗のない長さ11mmほどの仮想斜面を1秒くらいの時間でリング節まで滑り落ちるとすると、落体の法則から
11=gsint×1^2/2~=gt/2
が成り立つ。gは重力の加速度9.8m/sec^2である。
そうすると、平均振幅~=11tによって、平均振幅が概略計算できる。結果は0.02mmとなるので、このモデルを許容してよいだろう。
この場合、仮想斜面の形状がsinrのような振動につきものの三角関数であるか否かは問題ではないので、直線状の斜面で置き換えて構わない。
ここまでくると、シミュレーションをするまでもなく、その結果がみえてくるが、簡単なコンピュータ・シミュレーションを行って確認しておこう。
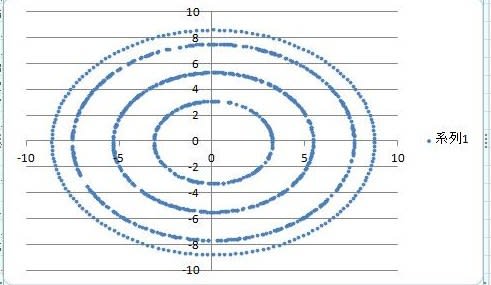
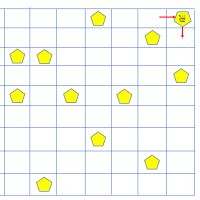
Excelを用いて、3.2<r<8.7の範囲の動径rと0<t<2*PI()の範囲の偏角tについてそれぞれ約1000個の一様乱数をとって値を貼り付ける。各データ点は、円板上にばらまいた粒子を表現している。
各粒子が上記のような仮想振動モデルに従って移動するとすれば、各粒子は1秒程度の時間を経て、r=3.2,5.4,7.6のいずれかに集結するであろう。粒子は、リング間の中点を境界として低位のリングまたは高位のリングに向けて移動するであろうから、粒子のr位置を5つのケースに場合分けして、各々の集結先まで移動させることにした。もし粒子が振動のリング節またはリング間の中点にあれば、移動せずその位置にとり残されることになる。
移動後の粒子の位置を(r,t)座標から(x,y)座標に変換し、グラフ表示する。下図にそのグラフを示す。
参考文献
谷口駿一著「クラドニ図形による固有振動モードの解析」(インターネット)
そこで、この際、コンピュータ上でクラドニ図形をシミュレートして可視化できるものか試行することにした。
計算に当たっては、参考文献の実験値を利用させてもらうことにした。この実験は、アクリルの円板上に粒子をまいておいて、円板中心の下部に加振器を設け、円板に色々な周波数の振動を与える。振動数が円板の固有振動数になったとき、円板上に同心円状のクラドニ図形が現れる。円板は、動径(r)方向にリングを節とする定常波の形態で振動していることを示している。また、隣接する二つのリングを結ぶ放射状の線も見られる。
円板が固有振動モードになったとき、円板の振動は、動径方向の振動と偏角方向の振動とを重ね合わせたものになると考える。しかし、今回のシミュレーションでは、計算を簡単にするために、動径方向の振動のみに着目することにした。計算結果の数値にこだわるよりも固有振動モードという概念の可視化に重点をおくためでもある。
円板の半径は約8.7cmであり、得られている実験値は次の通りである。
振動数(Hz) リングの数 波長(cm)
395 2 5.8
622 3 4.4
1049 4 3.5
円板の中心は振動の湧き出し口になるので、複雑な振動波形となるであろう。中心に最も近い第1リング以後の動径rで安定な振動波形が得られているであろう。
第1リングと第2リング、第2リングと第3リング、第3リングと第4リングの間隔は、いずれも波長/2になっていると仮定した。また、最終リングから円板のふちまでは開放端であるので、波長/4になっていると仮定した。
この仮定をおくと、円板の中心から第1リングまでの間隔が計算できる。結果は、固有振動数の小さいものから順に4.3,3.2,2.6cmであり、振動数が上がるに従ってその間隔が小さくなる。
円板を打つなどすると振動するが、摩擦抵抗のために減衰振動となってやがて振動は停止する。加振器などにより円板に強制振動を加えると、振動は持続する。特に、外力の角振動数wが円板の固有角振動数w0に一致するとき、その振幅は最大値をとる。この現象は共振と呼ばれている。
円板は複数の固有振動モードをもつという観点からみれば、円板の振動は弦の振動と似ている。しかし、動径方向(r方向)のほかに偏角方向の振動が加わるので、弦の振動と同じではない。また、弦の振動と異なり、振動の湧き出し口があったり、動径方向の境界条件や円板面と垂直な方向の境界条件が異なり、複雑である。このため、固有振動数とリング数との間の関係式は得られない。
ここでは、固有振動数はともかくとして、リング数3の固有振動モードをシミュレーションの対象とした。
円板の上面をxy平面上においたとき、z方向の振動による垂直変位の境界条件は、z>0側で自由端、z<0側で円板実体から抗力を受けるので、z>0側の振幅auはz<0側の振幅adより大きくなるであろう。
z方向の変位は、平均場の理論に従うとすれば、円板のz方向の変位の時間平均は、振幅が(au-ad)/2の平均値となり、振動を表す関数は、この平均振幅と、たとえばsinrのように時間によらない場所だけの関数をもつ仮想振動パターンで定義できるだろう。この仮想振動モデルによって計算が容易になるので都合がよい。
ここで、この仮想振動モデルを検証するとともに、平均振幅を求める概略計算を行っておこう。
リング間に置かれた粒子が、微小な傾斜角度tをもつ摩擦抵抗のない長さ11mmほどの仮想斜面を1秒くらいの時間でリング節まで滑り落ちるとすると、落体の法則から
11=gsint×1^2/2~=gt/2
が成り立つ。gは重力の加速度9.8m/sec^2である。
そうすると、平均振幅~=11tによって、平均振幅が概略計算できる。結果は0.02mmとなるので、このモデルを許容してよいだろう。
この場合、仮想斜面の形状がsinrのような振動につきものの三角関数であるか否かは問題ではないので、直線状の斜面で置き換えて構わない。
ここまでくると、シミュレーションをするまでもなく、その結果がみえてくるが、簡単なコンピュータ・シミュレーションを行って確認しておこう。
Excelを用いて、3.2<r<8.7の範囲の動径rと0<t<2*PI()の範囲の偏角tについてそれぞれ約1000個の一様乱数をとって値を貼り付ける。各データ点は、円板上にばらまいた粒子を表現している。
各粒子が上記のような仮想振動モデルに従って移動するとすれば、各粒子は1秒程度の時間を経て、r=3.2,5.4,7.6のいずれかに集結するであろう。粒子は、リング間の中点を境界として低位のリングまたは高位のリングに向けて移動するであろうから、粒子のr位置を5つのケースに場合分けして、各々の集結先まで移動させることにした。もし粒子が振動のリング節またはリング間の中点にあれば、移動せずその位置にとり残されることになる。
移動後の粒子の位置を(r,t)座標から(x,y)座標に変換し、グラフ表示する。下図にそのグラフを示す。
参考文献
谷口駿一著「クラドニ図形による固有振動モードの解析」(インターネット)


※コメント投稿者のブログIDはブログ作成者のみに通知されます