









今回は
サーボモーターのテストと
尾脚引込機構の組み立て(3)です。
昇降舵用サーボモーターの
動作確認をして
尾脚用ギアボックスに組み込む。
さらに
尾脚引込機構の組み立てを続けます。

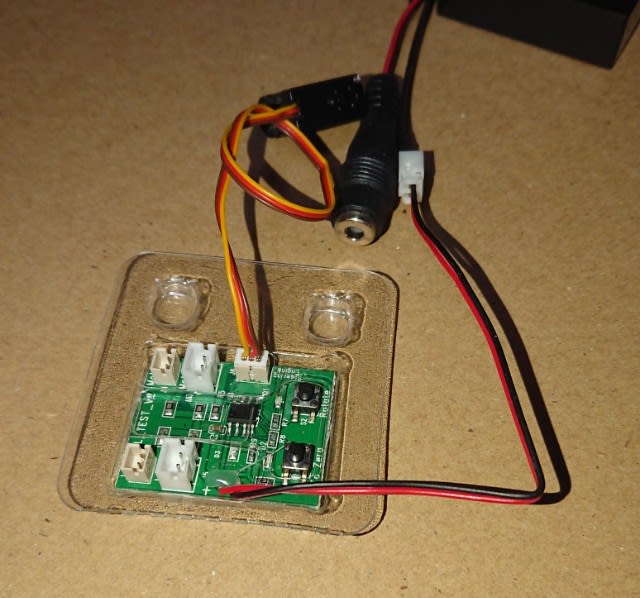
今回の動作確認のための
基盤が付属されています。
一応
埃防止のためのカバーが
覆っています。

STEP1
サーボモーターのテストと組み込み
まずは
サーボモーターのテストをしますが
今回遅くなってしまったのは
『単4電池』の購入のためです。
何気に
『JEEP』や『インプレッサ』で
使用してしまったため
予備の『単4電池』が
不足しちゃいました f(^_^;
それでは
以前プロペラの動作確認をした時の
電池ボックスに電池をセットして
テスターをコネクターに繋げます。

この基盤の配置として
次のような意味が記載してあります。

これを理解した上で
サーボモーターテスト用コネクターに
サーボモーターのコネクターを
接続します。
電池ボックスの電源スイッチを
ONにするとテスターの電源ライトが
赤く点灯します。
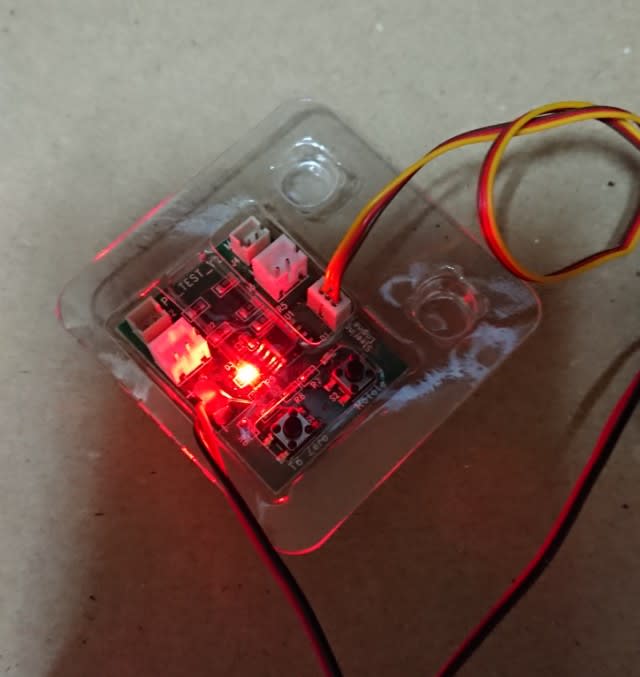
テスターの
サーボモーターリセットボタンを
押すとボタンの上が青く点灯して
サーボモーターの軸が中立位置に
セットされます。

サーボモーターの軸の回転を
テストするので分かりやすくするため
アームを取り付けます。

アームを取り付けたら
サーボモーターテストボタンを
押します。
こちらも
ボタンを押すと上が青く点灯して
取り付けたアームが左右に
約90度ずつ回転しますので
その確認をします。
↓ 動作確認 ↓
"昇降舵用サーボモーターの動作確認" を YouTube で見る
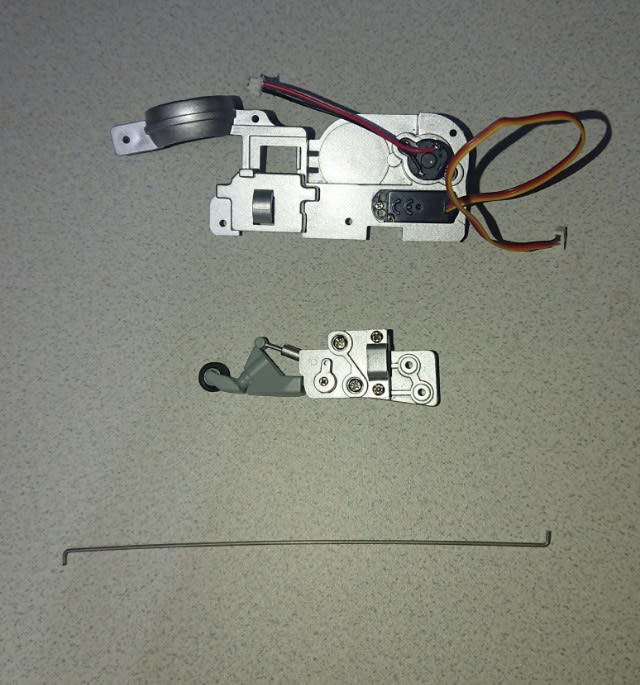
確認が終わったら
アームを取り外して
ギアボックスに取り付けます。
配線が外側に出るようにします。

STEP2
尾脚の組み立て
尾脚支柱に
タイヤとピストンロッドを
取り付けます。
まずは
尾脚支柱の右側に
タイヤをはめ込み
尾脚支柱の左側に
ピストンロッドをはめ込みます。

そしたら
尾脚支柱同士を接着剤で
固定します。
この時
ピストンロッドとタイヤに
接着剤が付かないようにします。
(可動するためです)

ピストンロッドに
シリンダーチューブをはめます。
こちらも可動するため
接着剤は使用しません。

組み上げた尾脚支柱と
シリンダーチューブに
尾脚フレームを取り付けます。
まずは
尾脚フレームの左側に
ピストンロッドと尾脚支柱を
差し込みます。

そして
尾脚フレームの右側を
はめ合わせてネジで固定します。
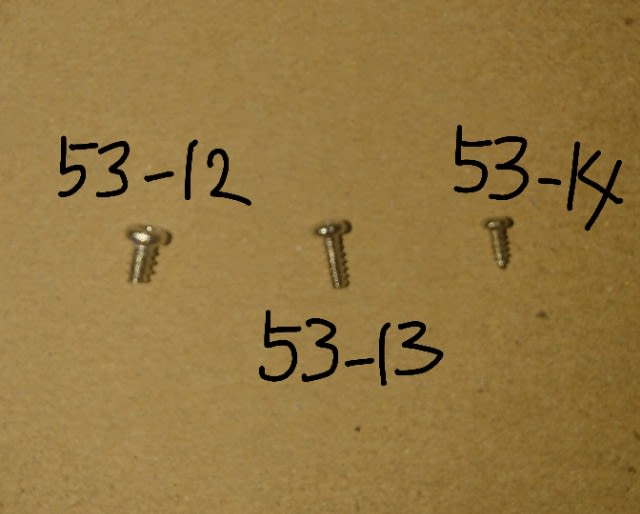
今回はネジが三種類
同じ袋に入っていますので
間違えないようにしましょう。
ネジの詳細は
相変わらず説明がないので
自分で画像を見てやらないとです。
一応
参考までに貼っておきますね。
理解をした所で
ネジで固定をしていきます。

尾脚フレームの右側の穴から見える
尾脚支柱の軸とアームを合わせて
はめ込みます。
この時
お互い半月状の形状になってるので
ちゃんと合わせます。
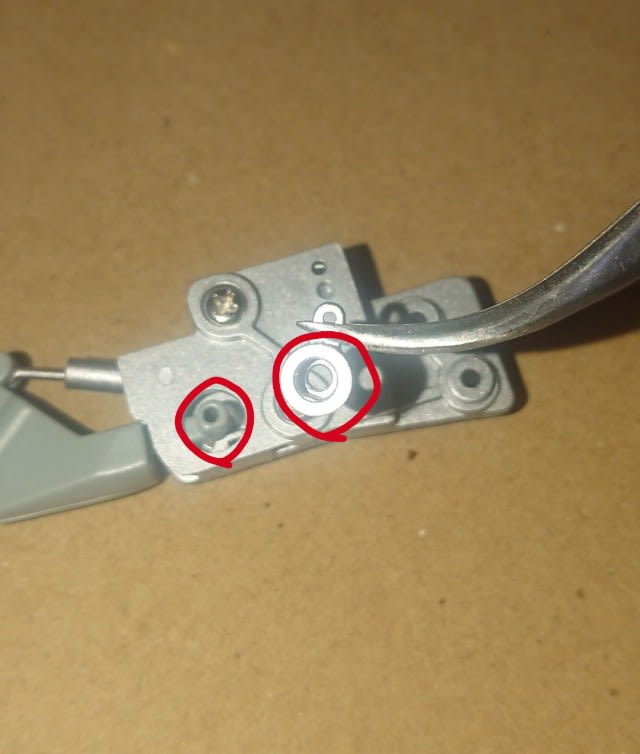
ちゃんとはめ込むと
『カチ』っと音がします。
ここは
しっかりとはめ込むと所なので
隙間が空いてないか?……を
確認しましょう。
(中が見えたらNG)

取り付けたアームを
ネジで固定します。

最後に
アームを取り付けた側に
部品を取り付けます。
この部品には
突起がありますので
それを合わせます。

はめ合わせたら
ネジで固定します。

これで今回の作業は終了です。
次回は
『方向舵用サーボモーターの
テスト』です。
次回テストということは
組み立ては無さそうですね。
まぁ…
動作確認をしながら製作は
安心しますよね。
『インプレッサ』なんて
全110号の中で
第105号で電気系統の
動作確認でしたもんね f(^_^;
こういう系は
動作確認しながらの製作なんかな?
『F-14 トムキャット』も
動作確認しながらの
製作でしたもんね。
せっかくのギミックなので
慎重に製作するのは有難いですね。










※コメント投稿者のブログIDはブログ作成者のみに通知されます