機種の編集はオリジナル機体のコピーを使って行うようです。
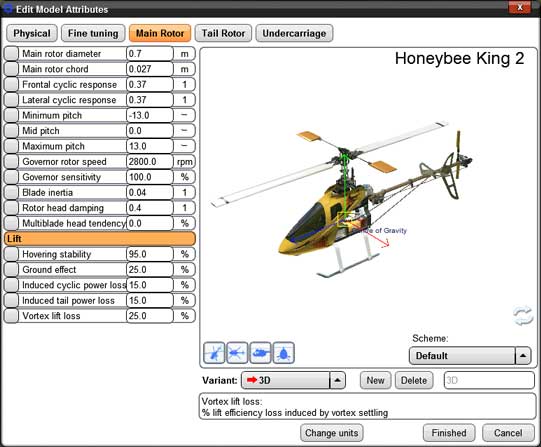
元になる機体を選択して、異形(Variant)が有る物は異形を選びます。
そして「NEW]のボタンを押すと、「~Copy」という名でとして機体が作成されます。
「~Copy」として作成された機体の名前を変える事も出来ます。
その機体の削除は「Delete」ボタンで削除する事もできます。
その後、作成されたコピーを編集します。
また機体の色などが変更する事が出来る機体の場合、「Scheme」のプルダウンに変更可能な項目が出てきます。
(このKing2の場合、キャノピーの色を白に帰る事ができます。)

物理特性
Physical |
|
重量
Weight |
機体重量
Flying weight of model |
正面の重心
Frontal centre of gravity |
ローターヘッドから前方向の重心位置
Centre of gravity of aircraft in frontof rotor-head |
垂直重心
Vertical centre of gravity |
ローターヘッドから垂直方向への重心位置
Centre of gravity of aircraft below rotor-head |
船首揺れの慣性
Yaw inertia |
回転変化へのモデル応答の速度
Speed of model response to rotational change |
ピッチの慣性
Pitch inertia |
回転変化へのモデル応答の速度
Speed of model response to rotational change |
ロール慣性
Roll inertia |
回転変化へのモデル応答の速度
Speed of model response to rotational change |
正面の抗力の領域
Frontal drag area |
モデル機体の抗力の領域
Drag area of model fuselage |
側部の抗力の領域
Lateral drag area |
モデル機体の抗力の領域
Drag area of model fuselage |
垂直な抗力の領域
Vertical drag area |
モデル機体の抗力の領域
Drag area of model fuselage |
丈夫さ
Robustness |
モデル機体影響の丈夫さ
Robustness of model fuselage impact |
最大の燃料飛行時間
Maximum fuel flight time |
燃料切れまでの飛行時間(0=無限)
Fling time of model before fuel depleted(0=infinite) |
モーター/サーボ
Motors/Servos |
|
出力
Power |
エンジンによって作り出された出力
Power developed by engine |
最大回転出力
Engine RPM at max torqu |
最大出力/トルク出力におけるエンジン回転数
RPM of engine at maximum power/torque output |
メイン・ギア比
Main gear ratio |
メイン・トランスミッションのギア比
Main transmission ratio |
最小スロットル
Minimum throttle |
最小スロットル・ポジション
Minimum throttle position |
最大スロットル
Maximum throttle |
最大スロットル・ポジション
Maximum throttle position |
スロットル・レスポンス
Throttle response |
スロットル変化時のエンジンレスポンス[負荷/無負荷]
Engine response to throttle change [loaded/unloaded] |
サイクリックサーボのレスポンス
Cyclic servo response |
サイクリック入力時のサーボレスポンス[スピード/プレー]
Servo response to cyclic input[speed/play] |
コレクティブ・サーボのレスポンス
Collecyive servo response |
コレクティブ入力時のサーボレスポンス[スピード/プレー]
Servo response to collectine input[speed/play] |
テールサーボのレスポンス
Tail servo response |
テール入力時のサーボレスポンス[スピード/プレー]
Servo response to taill input[speed/play] |
オプション
Options |
|
| Rotor governor enabled |
ローター・ガバナーの使用 |
| Multiblade gyro compensation enabled |
マルチブレード・ジャイロ補正の使用 |
トレーニング・ギア
Training Gear |
トレーニング・ギア(アメンボ) |

微調整
Fine tuning |
|
持ち上げ調整
Lift tuning |
|
サイクリック調整
Cyclic tuning |
|
テール出力調整
Tail power tuning |
|
ナイフエッジ調整
Knife edge tuning |
|
| Tail rotor wash tuning |
|
| Control expo |
|
| Elevator expo |
エレベーター Exp |
| Aileron expo |
エルロン Exp |
| Rudder expo |
ラダー Exp |
メインローター
Main Rotor |
|
メインローターの直径
Main rotor diameter |
メインローターブレードの直径
Diameter of main rotor blades |
メインローター翼弦
Main rotor chord |
メインローターの長さ
Chord length of main rotor blades |
正面方向へのサイクリック・レスポンス
Frontal cyclic response |
正面方向へのサイクリック入力のレスポンスの大きさ
Magnitude of response to frontal cyclic input |
横方向へのサイクリック・レスポンス
Lateral cyclic response |
予行方向へのサイクリック入力のレスポンスの大きさ
Magnitude of response to lateral cyclic input |
最小ピッチ
minimum pitch |
スティック最下位でのメインローターピッチ
Main rotor pitch at lower stick position |
中間ピッチ
Mid pitch |
スチィック中央でのメインローターピッチ
Main rotor pitch at central stick position |
最大ピッチ
Maximum pitch |
スティック最上位でのメインローターピッチ
Main rotor pitch at highest stick position |
ガバナー・スピード
Governor rotor speed |
ガバナーによるメインローター回転数
Rotor RPM attempted by governor |
ガバナー・応答速度
Governor sensitivity |
ガバナー・応答速度
Governor sensitivity |
ブレード慣性
Blade inertia |
回転変化へのローター・ブレードの応答速度
Speed of rotor blade response to rotational change |
ローターヘッドのダンピング
Rotor head damping |
ローターヘッドのダンピング量
Amount of damping of rotor head |
マルチブレード・ヘッド傾向
Multiblade head tendency |
マルチブレードによる動きの量
Amount of motion due to multiple blades |
| リフト |
|
ホバリング安定性
Hovering stability |
ホバリングの安定係数
Stability factor in level hover |
大地効果
Ground effect |
地面近くの上昇力
Lift gained by ground proximity |
サイクリック・パワー損失
Induced cyclic power loss |
サイクリックが入力された時のパワー損失
% Power loss induced by cyclic control input |
テールのパワー損失
induced tail power loss |
テールの入力で起きるパワー損失
% Power loss induced by tail input |
渦巻きでのパワー損失
Vortex lift loss |
渦巻き設定によって引き起こされたリフト効率の損失
% lift efficiency loss induced by vortex setting |

テールローター
Tail Rotor |
|
ジャイロモード
Gyro mode |
このヘリコプターで使うジャイロのタイプ
Select the type of gyro this helicopter used |
テール駆動モード
Tail drive mode |
このヘリコプターが使うテール駆動モード
Select the mode of tail-drive this helicopter used |
テール回転数
Tail RPM |
テールローターの最大回転数
Max RPM of tail rotor |
テールローター直径
Tail rotor diameter |
テールローターの直径
Diameter of tail rotor |
最大テールローター・ピッチ
Maximum tail-rotor pitch |
最大テールローター・ピッチ
Maximum tail-rotor pitch |
ホバリング時のテールローター・ピッチ
Tail-rotor pitch at hover |
ホバリング時のテールローター・ピッチ
Tail-rotor pitch at hover |
最小テールローター・ピッチ
Minimum tail-rotor pitch |
最小テールローター・ピッチ
Minimum tail-rotor pitch |
ジャイロ感度
Gyro sensitivity |
回転変化に対するジャイロの反応時間
Reaction time of gyro to rotational change |
サーボ遅延
Servo delay |
テール・サーボの反応の遅延
Delay in response of tail servo |
レボリューション・ミキシング
Revolution mixing |
レボリューション・ミキシング
Revolution mixing |
最大ピルエット・レート
Max pirouette rate |
テール最大入力時のヘッドロック・ホールド
ピルエット・レート
Heading-hold pirouette rate at maximum tail input |
テール・フィンの領域
Tail fin area |
テール・フィン部分の領域
area of tail assembly fin section |
テール安定領域
Tail stabiliser area |
テール安定装置部分の領域
Area of tail assembly stabiliser section |

着陸装置
Undercarriage |
|
正面ギアの摩擦
Frontal gear friction |
ランディング・ギア/スキッドの前進運動への抵抗
Resistance to forward motion of landing gear/skids |
側部ギアの摩擦
Lateral gear friction |
ランディング・ギア/スキッドの横の動きへの抵抗
Resistance to sideways motion of landing gear/skids |
ギア・スプリング
Gear spring |
ギアの弾み特性
Bounce factor of gear |
車輪の範囲
Guide wheel travel |
車輪の動きの範囲
Range of guide wheel motion |
ギアの丈夫さ
Gear robustness |
入力するランディング・ギア/スキッドの丈夫さ
Robustness of landing gear/skids to input |











