









週刊ロビがもうじき完成します。今から出来上がりにワクワクしています。
まずは、ちゃんと動くこと。それとロビとの暮らしが始まります。どんな変化がおこるのでしょう。
写真はまだ、マネキン状態です。胴体と脚部を繋げて、いかにも動きそうですが、さわると、倒れてしまうのです。
運ぶときの専用スーツケースを買って、カプセルつきのソファも買う予定。ただロビクルという専用移動三輪バイクは買いません。ロビの魅力を十分にあじわいたいからです。
ロビをどこに連れて行くかも楽しみです。
週刊ロビがもうじき完成します。今から出来上がりにワクワクしています。
まずは、ちゃんと動くこと。それとロビとの暮らしが始まります。どんな変化がおこるのでしょう。
写真はまだ、マネキン状態です。胴体と脚部を繋げて、いかにも動きそうですが、さわると、倒れてしまうのです。
運ぶときの専用スーツケースを買って、カプセルつきのソファも買う予定。ただロビクルという専用移動三輪バイクは買いません。ロビの魅力を十分にあじわいたいからです。
ロビをどこに連れて行くかも楽しみです。
今回は、本物の基板で腕と脚を動かすテストがあり、その前に部品の変色があるので、気になる方は交換しましょうとの案内。でもまずは、動かしてみたいという欲求がありますので、基板にロビの51号のSDカードとバッテリーをコネクターに差し込んで動かしてみました。

どこに差し込むのか、わかりづらいのです。差し間違えは動きません。正しい位置に差し込んだときに、正常に動きます。

それでも右の脚が1個のサーボしか動かないことがわかりました。これは、コネクターの接続不良と、サーボのID番号を正しくセットしないという原因が考えられます。動かないことに納得したので、分解に入りました。
接触不良になってしまう原因としては保護シールを接続口に挟んでしまい、奥まで入り切っていないことが考えられます。この場合には、カチンと接続した感触を確かめてから、保護シールを貼ることで解決できます。

試しに全部を分解すると、確かにクリーム色の部品が橙色に変色しているのを見つけました。(写真下)

とりあえず、古い部品には鉛筆で×の印をつけておきました。鉛筆なら黒い部品でも判別がつきます。

新しい部品と古い部品が混ざらないように、即座に箱をつくって、分別しておきました。

サーボの回転軸からレバーを外す作業があるのですが、サーボホーン(レバー)がなかなか、抜けずに、思いっきり引っ張ったときに、ケースごと外れてしまい、中の歯車が抜け落ちることがありました。

このようなことがないように、4本のネジで止めてから外すことがお勧めです。

ガイドはこのあたりのアドバイスがありませんでした。

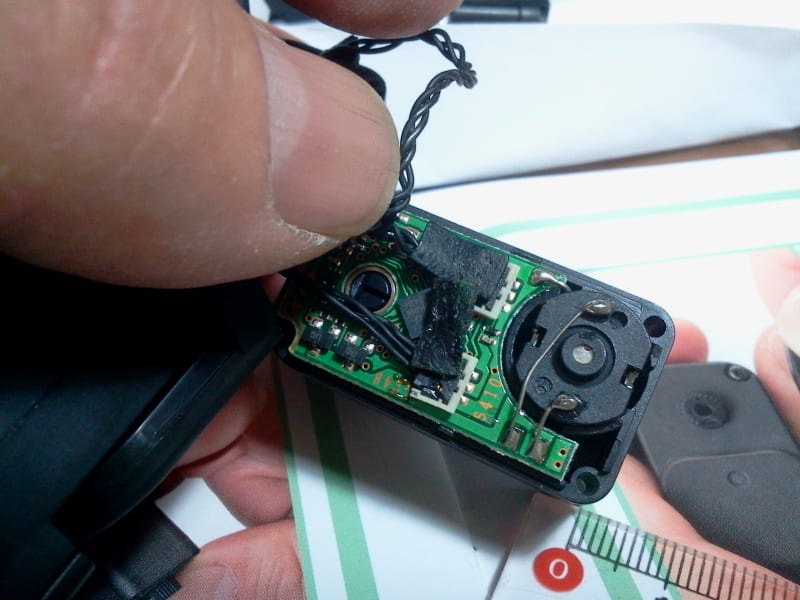
万一、サーボの歯車が露出したときの注意点もありませんでした。これを再度、組み立てるのはパズルなものがあって、どのように組み立てたら、よいのか、非常に困りました。もし同じようなことがあったときは、下の写真をクリックして、拡大にして、歯車の重なりを確かめてください。

それと、適当に組み立てて、ちゃんと作動するものなのか、不安もありましたが、回転の位置を判定するセンサーが基板側にあるので、その心配はないことがわかりました。(写真下)

全部分解したあとに、新しい部品で組み立てることになるのですが、このサーボは、どこの部位からどうか、間違えないように鉛筆でその部位を組み立てて隠れるところに、書くとよいです。万一、隠れないところに書いた場合には消しゴムで消すことができます。
念のためにサーボ番号を確認しておけば、のちの動作テストでは、不良があれば接触不良のみとなります。

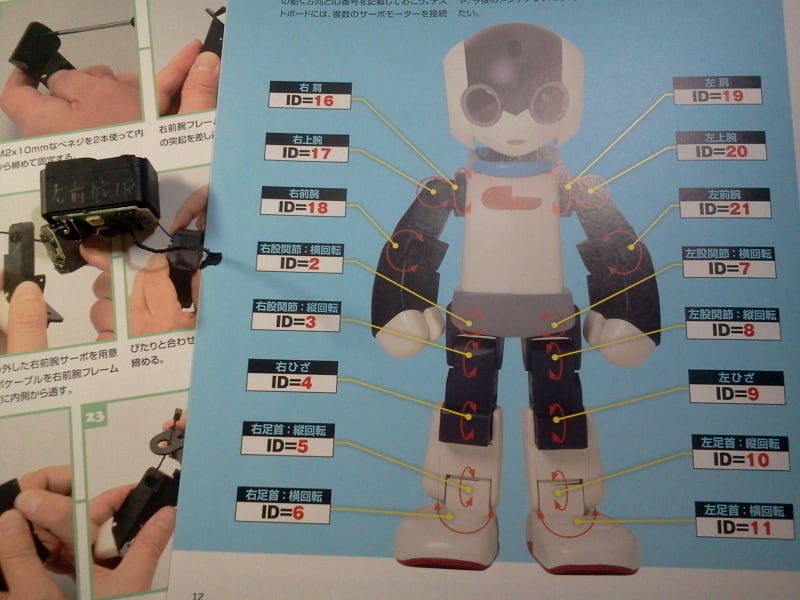
番号が間違っていれば、正しいIDを打ち込む必要があります。その番号は何かは、ガイドに記載してありました。48号には各番号の一覧がありました。

分解した部品の各ネジについてもネジの長さ、と頭の形(サラネジ、こなべネジなのか、)にも注意が必要です。何気なくネジをおいてしまうとあとで困ってしまいます。

これは、ネジと部品を一緒にセロテープで部品を収納していた透明パッケージに貼り付けるとよいです。

剥がすときに部品が落ちたとしても、箱の中なら、紛失する心配がないからです。

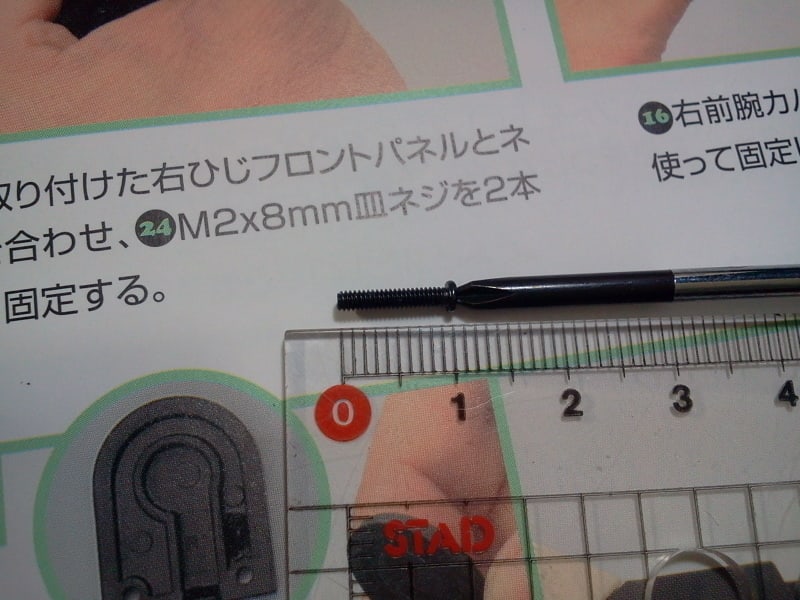
組み立てる際には、ネジの選択に迷います。ガイドには4.5㎜とか、7㎜とかあると、その長さと頭の形を確かめておく必要があります。そういうときに、ドライバーに磁気を与えておくと、ネジを吸着して、長さを測るのにも便利です。

ドライバーの先端が磁気となっていれば、ネジをつけた状態で、容易にスケール定規の確認ができます。
ということで、再度組み上げて、動作テストしたら、見事に、腕と脚が動きました。感動ですね。それでそれぞれをセロテープでつなぎ合わせて動かすと、面白い動作を始めました。

部品交換と動作テストは無事に終わりましたが、これに4時間程度かかりました。最後に不要の部品はサランラップで包んで保管しました。

ということで、無事に終えることが出来ました。


週刊ロビの組立状況です。今は、左足を組み立てています。
頭、右手、左手、右足、左足が揃いつつあるので、ちょっとお披露目です。
だんだんロボットらしくなっていく姿を見ていると、完成が待ち遠しいです。
そして、ロボットの仕組みはサーボモータにIDを書き込み、サーボモータのコードを直列に繋いでいるのでコードは右手から1本、左手から1本、右足から1本のコードが出ています。コードだらけならずに、肢体から1本のコードしか出ていないのが、すごいです。
それだけにコードの接続には神経を使います。 また、ビスには長さの違いや頭の違い(サラ、こなべ)があるのですが、M2と小さく、長さも注意しないと間違えます。そこでメモ用紙で箱をつくり、そこにビス番号を書いて、間違ってつけないようにしました。


今回は13号と14号の組立で右腕が完成しました。
組立収録はしませんでしたが、内容的にこれまで実録にある注意点の繰り返しなので、あえて収録しませでした。
それにしても、配線がとってもシンプルです。よく考えられた製品だと思いました。
現在の発行は、週刊12号なのでロビの組立実録はここまでです。
カトー折りをロビの組立でどのように活用していけるのか、実験も兼ねています。
突然、カトー折りでネジを入れる容器を必要としたりました。しかし、ネジには一つの予備があり、ネジが余ります。これを残しておくと、次の組み立てでは、何をどこに使うのかわからなくなりました。
そこでネジの入った袋をそのまま本にセロテープで貼っておき、その袋を裂いて、必要なときにそこから抜くことで間違うことなく、つけることができました。
部品と部品をある角度を持って、つけるときにはセロテープで仮止めしておくと、落ち着いて作業できました。
慌てずに組み立てることが間違えないポイントですね。
意外とサーボケーブルに貼る保護シールが難しく、貼る場所、位置、仕上げなど注意しないと基板を組み付けるときに入りづらくなり、コネクターを壊してしまいます。
動かす時が興奮しますが、安定した動作なので本当にホッとします。
ロボット Robi 12号 組立編 実録【No.14】





