今年から熱帯になったのかと思うほど、夕方に雨が降り、夜中でも湿度が80パーセントを
超えることがたびたびで、へろへろになっているものの、座り込んでいては先に進まず、
用事が次々と増えていくので、出来ることから片付けていくことに。
さて、「夏休みの工作」。いきなり完成状態に。
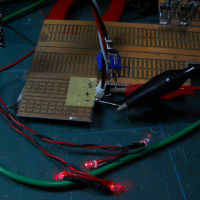
足踏みペダルのリンク内部が都合よく水平に動くので、そこからスライドボリュームの軸に
リンケージを取り付けることに。
ここらは模型店ならではの部品で、ヘリ用(HIROBO)のリンケージセットを使うことに。
ただ、軸と軸の間が20mmしかないため、リンケージを切り詰めて作ることに。
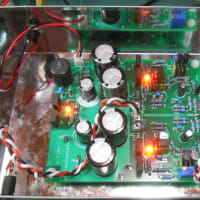
電動ミシンはシンガー KN-300EXで、最初フットペダルをネットを検索しても、
ほとんど重要な情報が得られず、しかたなく、ミシン本体を開けて中のマイコン基板と
結線、コネクタへの配線数を確認した後で適当なプラグを差込み、動作確認したところ
なるほどと思うことが。
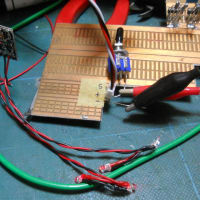
最悪、プラグ端子をショートさせても回路的に保護抵抗が入っていると予想されたので、
ワニ口クリップでショートさせると、なんと停止するとは。
よくよく考えてみると、0オームに近づくほどミシンの回転数が高くなるので、もし
ケーブルなどがショートした場合を想定して、わざとこのような設計にしていたのかと
勝手に納得することに。
そして、ペダルの踏む込む量で速度可変が出来るらしく、その抵抗値に苦慮すると
共に、10mmしかリンクの可動範囲がないので、これをどうするかで頭を悩ませられたものの
運よくスライドボリュームが入手できたので、可動範囲と抵抗値と強度と耐久性に若干の疑問が出た
ものの、毎度ながらの出たとこ勝負ということで、いっきに作り上げることに。
基板は専用基板となったため予定どおり収めることができたものの、リンクの位置が若干
ずれたため、僅かながら斜めに力がかかるのが気にかかるものの、こればかりは
使用状況を見るしかないので、この状態で御渡しすることに。
やれやれ、これで夏休みの宿題が終わり。よかったよかった。(かな?