路面電車と本線特急(モジュール内のエンドレス周回)
久々に路面電車走らせましたよーって話。
そろそろ地面工作を本格的に始めてこうと思ってるので、まずは現状で自動運転等が問題なく走ることをテストしました。

動画ではミラノ市電と大阪市電だけですが、
呉や和歌山名古屋も問題なく走ることを確認したので、
こっから地面工作を進めます。
5月に向けてそろそろエンジン掛けていきますよ~w
**********
需要ないと思いますが。。
自動運転装置ひとつで、2列車を同時に走らせ、かつ行き違いをさせる方法、というか動作原理みたいな。
使っているのは、TOMIX自動運転ユニットのモード2単線駅往復運転モードです。
(説明書は
こちらのサイトさんにあります。参考に。
…私も説明書なくしたので助かってますw)
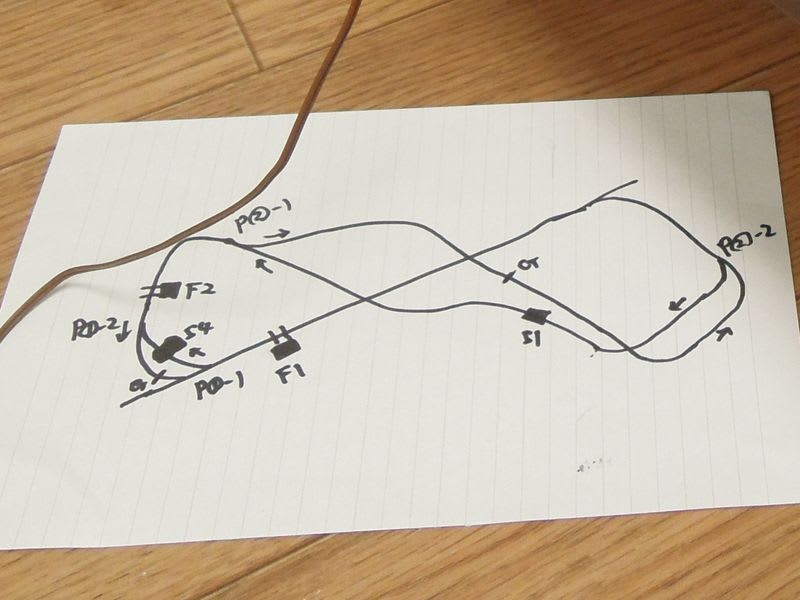
線路配置の概略とフィーダー、センサーの配置は以下の通り。
TOMIX自動運転ユニットはフィーダー端子二つ、ポイント端子二つがついてますが、
このプランではポイント4つを同時に切り替える必要があるので、ボード裏の基盤で配線を分岐させてます。
んで、こっからは動画の順で…
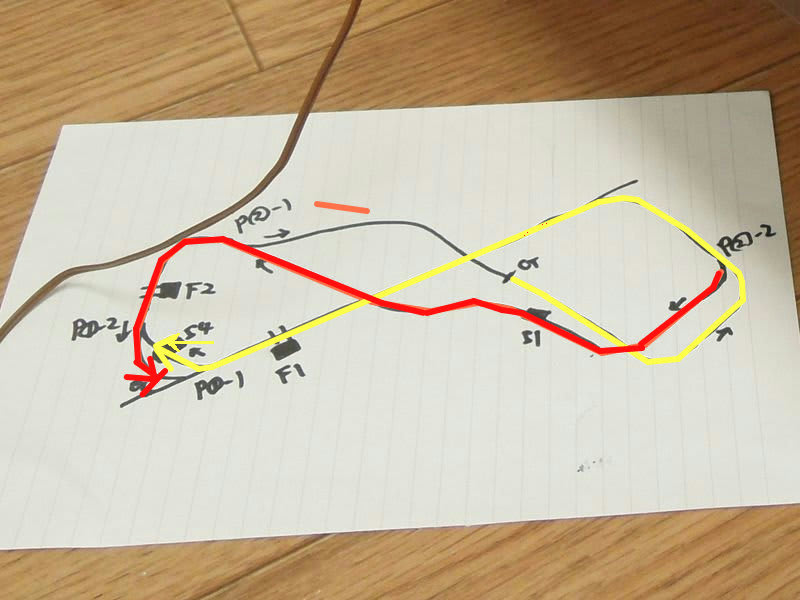
まず、赤と黄色のラインでこのように電車が動きます。両方のラインはギャップレールとポイントの完全選択で電気的に分離されており、
逆向きにさした二本のフィーダーから給電されることで、お互い逆方向に走ります。
先に赤いほうの電車が左下の駅に到着します。
P①-1は分岐側に開通しており、またホーム中ほどにギャップが設けてあるため、
ギャップからP①-1までが無電区間となり、赤い電車は停止します。
黄色いほうの電車は後から駅に到着し、P①-1を分岐側に進むと
センサーS4を踏みます。
センサーS4は「停止→ポイント切替→逆向きに発車」という動きをするセンサーです。

ポイントが切り替わり、P①-1が直線側に開通するので、赤い電車が走りだします。
単線駅往復モードなので、フィーダーからは先ほどと逆向きの電気が流れており、
黄色の電車が来たのと逆方向に、左下から右上のむきに赤い電車が走ります。
一方、黄色の電車も、左下の駅から出発し、P②-1を分岐側に入ります。
P②-1の分岐側の先、中央の駅にはギャップが設けてありますが、
ギャップの先、P②-2は直線側に開通していることから、
ギャップからP②-2までが無電区間となっています。
そのため、黄色の電車はギャップを超えたところで停止します。
赤い電車は、P②-2を分岐側に入り、センサーS1を踏みます。
センサーS1はセンサーS4とは逆の端にあたるので、これを踏むと電車は停止。
ポイントが切り替わったところで、最初の画像の状態に戻リます。
ね、意外とアイデア賞じゃないですか?笑
自動運転ユニットって中身は単純で、センサー踏んだら→指定されたポイント変えて→プログラム通り電気を流す の3通りの動きだけなので
工夫次第ではいろんな遊び方ができるんですね。
ちょっと欲しくなったでしょ?w
以上、宣伝でしたw
(冗談ですよ~、私とTOMIXとの間に何の関係もありませんww)
 にほんブログ村
にほんブログ村
↑どーでもいいですが動画撮りながらLINEしてるってちょっとあたらしくないッすか?w















